13.ROS2 custom interface message
1. Introduction to communication interface
In the ROS system, no matter the topic, service or action, an important concept is used - communication interface.
Communication is not a person talking to himself, but a communication between two or more people. What is the content of the communication? In order for everyone to understand it easily, we can define a standard structure for the transferred data, which is the communication interface.
Interfaces can reduce dependencies between programs, making it easier for us to use other people's code, and for others to use our code. This is the core goal of ROS, to reduce reinvention of the wheel.
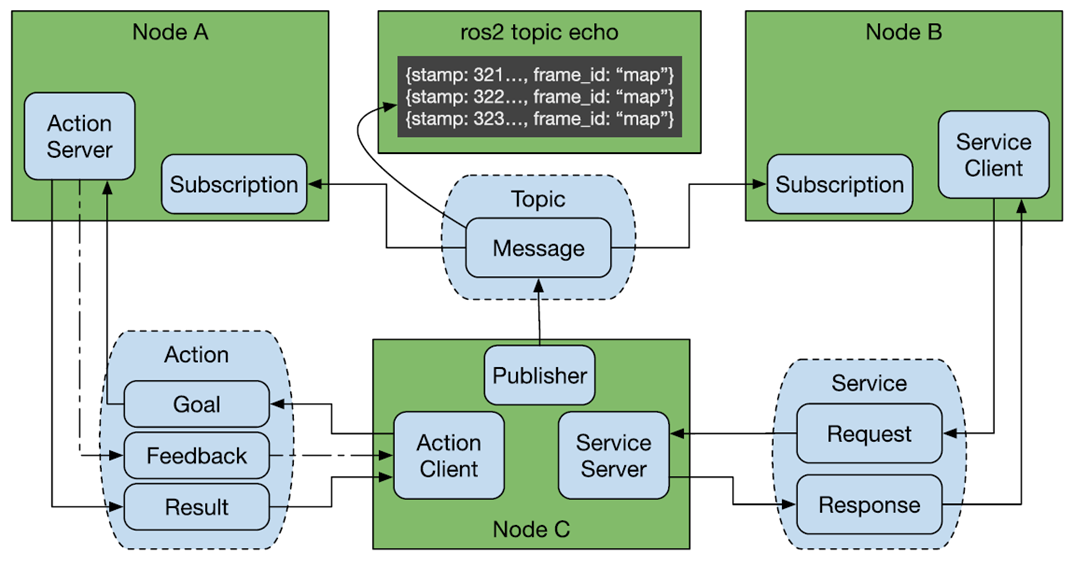
ROS has three commonly used communication mechanisms, namely topics, services, and actions. Through the interface defined by each communication type, various nodes can be organically linked together.
2. Create a custom interface process
The process of customizing interface messages is similar to the process of writing executable programs in function packages. The main steps are as follows:
- Create an interface function package;
- Create and edit .msg files, .srv files, and .action files
- Edit the configuration file;
- Compile;
- Test.
3. Create a custom interface for action communication
In the case of [11.ROS2 action communication server], we have already demonstrated the complete process of creating an action communication interface. You can go back and review it first, so we will not go into details here.
4. Create a custom interface for topic communication
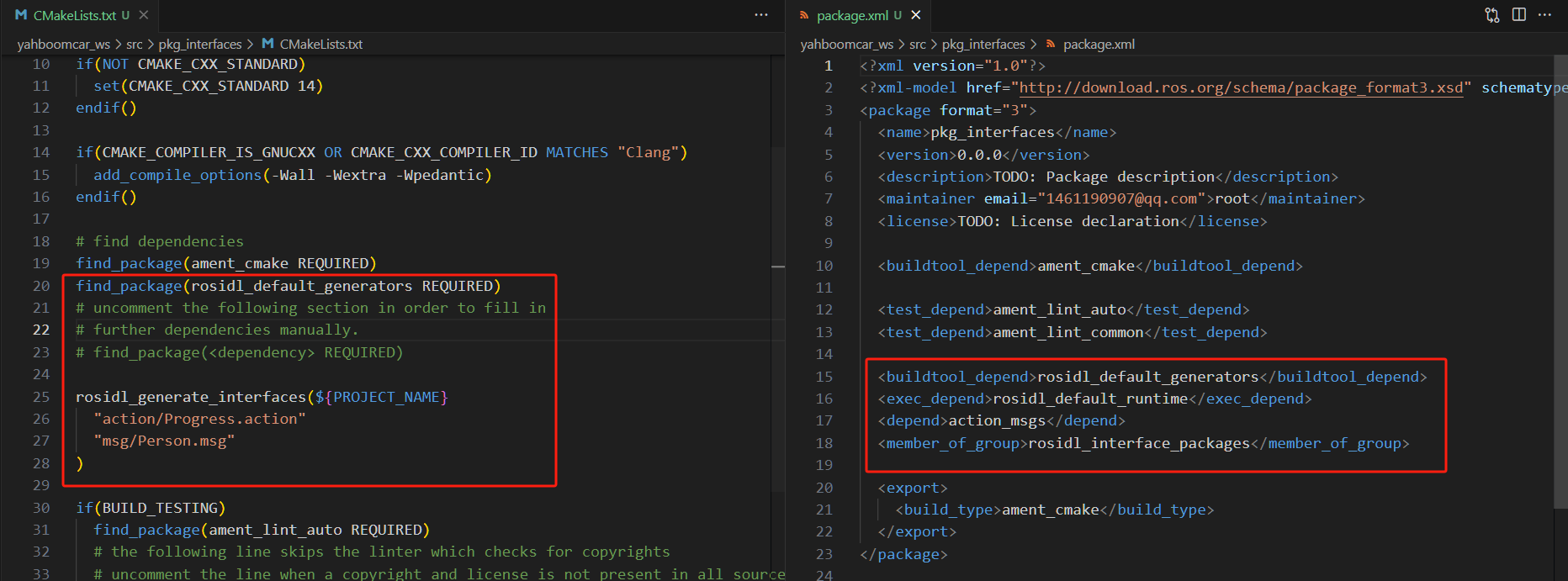
- In the [ROS2 action communication server] course, we have created a custom interface function package. Create a new msg folder under the function package pkg_interfaces, and create a new Person.msg file under the msg folder. Enter the following content in the file:
string nameint32 agefloat64 height
- Add the following configuration to package.xml and CMakeLists.txt:
- Enter the current workspace in the terminal and compile the function package:
xxxxxxxxxxcd ~/yahboomcar_ros2_ws/yahboomcar_wscolcon build --packages-select pkg_interfacessource install/setup.bash
- Test
xxxxxxxxxxros2 interface show pkg_interfaces/msg/Person
Under normal circumstances, the terminal will output content consistent with the Person.msg file.

5. Create a custom interface for service communication
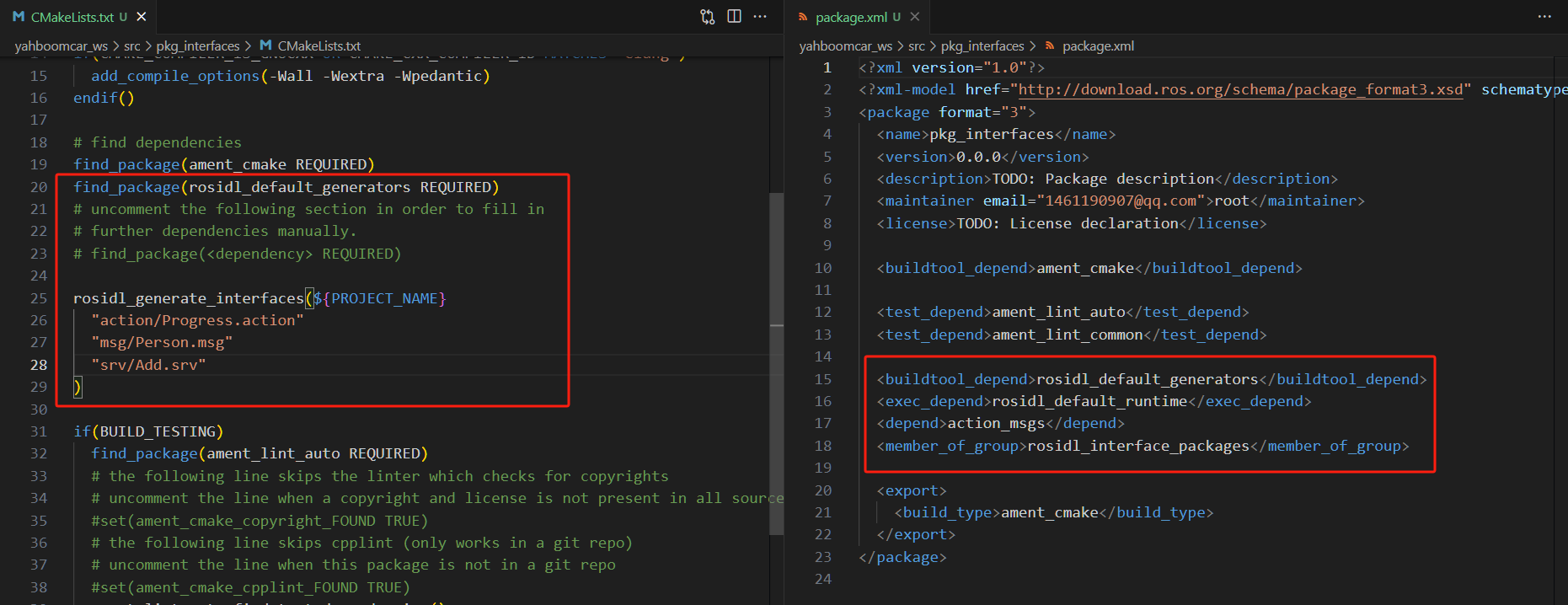
- In the [ROS2 action communication server] course, we have created a custom interface function package. Create a new srv folder under the function package pkg_interfaces, and a new Add.srv file under the srv folder. Enter the following content in the file:
xxxxxxxxxxint32 num1int32 num2---int32 sum
- Add the following configuration to package.xml and CMakeLists.txt:
- Enter the current workspace in the terminal and compile the function package:
xxxxxxxxxxcd ~/yahboomcar_ros2_ws/yahboomcar_wscolcon build --packages-select pkg_interfacessource install/setup.bash
- Test
xxxxxxxxxxros2 interface show pkg_interfaces/srv/Add
Under normal circumstances, the terminal will output content consistent with the Person.msg file.
