5. ROS2launch file is launched
In ROS2, launch is used to start multiple nodes and configure program running parameters. The launch file format of ROS2 is xml, yaml, and python. This lesson uses the launch file in python format as an example, which is more flexible than the other two formats:
- python has many libraries that can be used in startup files;
- ROS2 generic launch features and specific launch features are written in Python and thus have access to launch features that XML and YAML may not expose;
Using python language to write ROS2 launch file, the most important thing is to abstract each node, file, script, etc. into an action, with a unified interface to start, the main structure is:
xxxxxxxxxxdef generate_launch_description(): return LaunchDescription([ action_1, action_2, ... action_n ])1. Create a folder to store the launch file
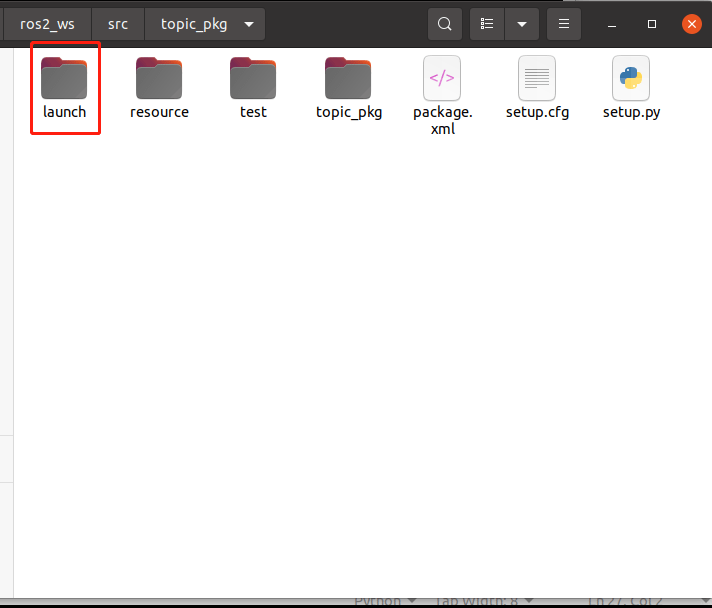
We create a new folder under the path of the function package created before to store the launch file, terminal input,
xxxxxxxxxxcd ~/ros2_ws/src/topic_pkgmkdir launch
The launch file is usually named LaunchName_launch.py, where LaunchName is custom and _launch.py is usually considered fixed. You need to modify the setup.py file in the function package to add the file in the launch path, so that the.py file can be generated by compiling.
xxxxxxxxxx#1、导入相关的头文件#1, import the relevant header fileimport osfrom glob import glob#2、在data_files的列表中,加上launch路径以及路径下的launch.py文件#2. In the data_files list, add the launch path and the launch.py file under the path(os.path.join('share',package_name,'launch'),glob(os.path.join('launch','*launch.py')))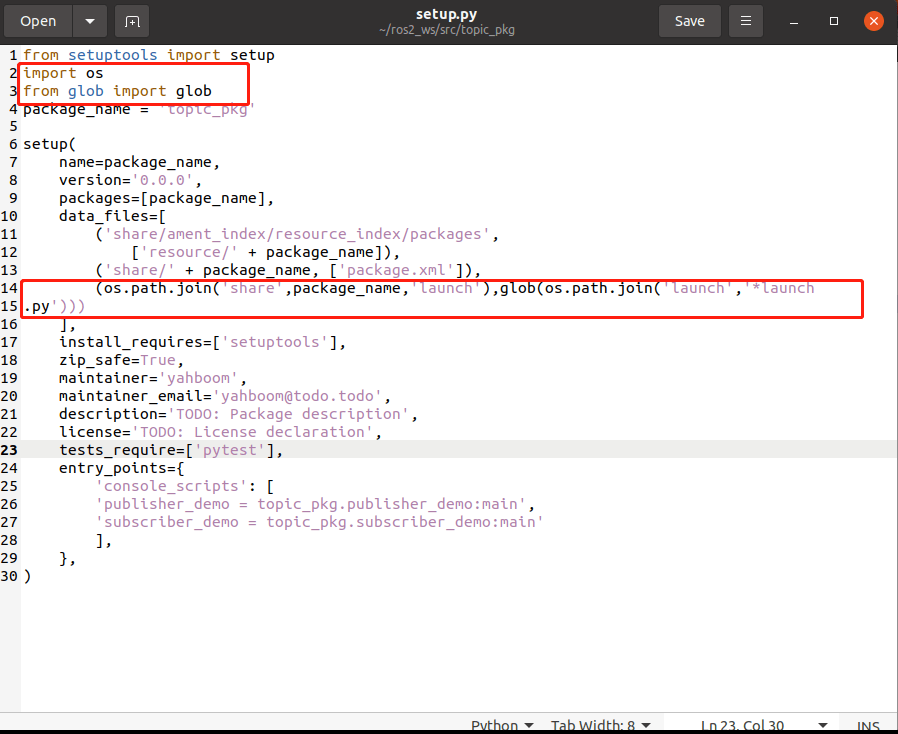
2. Write a single Node launch
Terminal input,
xxxxxxxxxxcd ~/ros2_ws/src/topic_pkg/launchgedit single_node_launch.pyCopy the following into the file,
xxxxxxxxxxfrom launch import LaunchDescriptionfrom launch_ros.actions import Nodedef generate_launch_description(): turtle_node = Node( package='turtlesim', executable='turtlesim_node', ) launch_description = LaunchDescription([turtle_node]) return launch_description2.1. Compile the workspace
Terminal input,
xxxxxxxxxxcd ~/ros2_wscolcon build
After compiling, refresh the environment variables in the workspace,
xxxxxxxxxxsource ~/ros2_ws/install/setup.bash
2.2. Run the program
Terminal input,
xxxxxxxxxxros2 launch topic_pkg single_node_launch.py
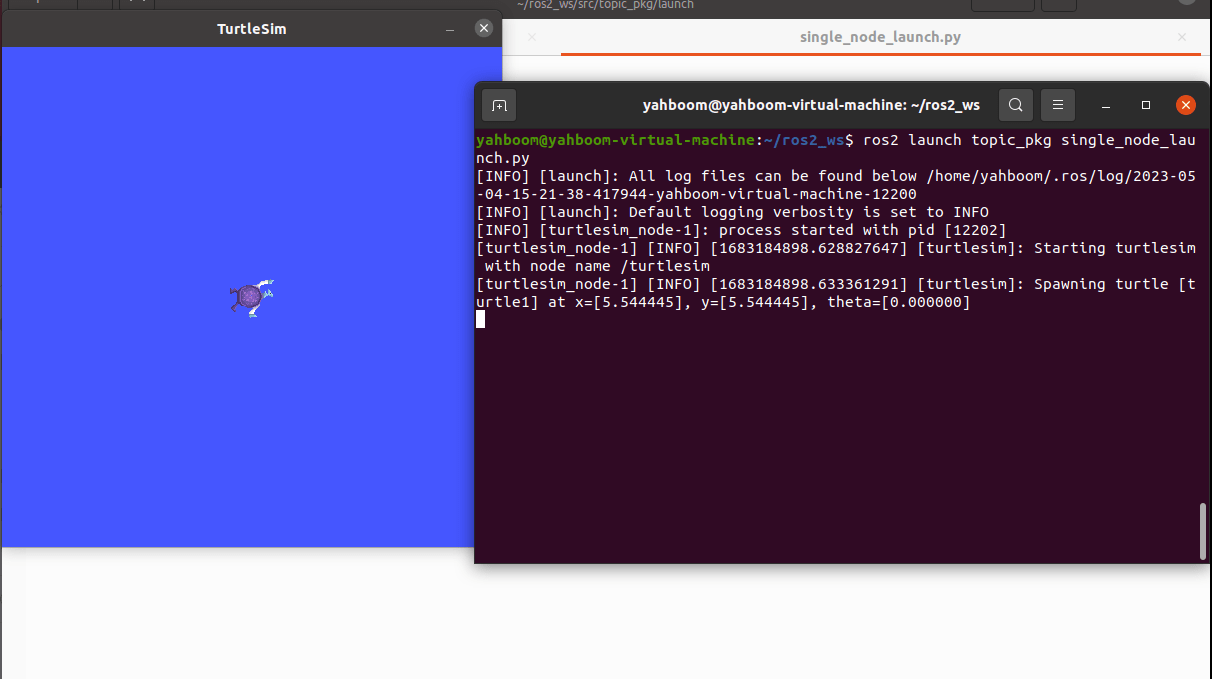
After the program runs, it will run on the node of the turtle.
2.3 Source code analysis
1).Import relevant libraries
xxxxxxxxxxfrom launch import LaunchDescriptionfrom launch_ros.actions import Node
After the program runs, it will run on the node of the turtle.
2). Define a function generate_launch_description and return a launch_description
xxxxxxxxxxdef generate_launch_description(): turtle_node = Node( package='turtlesim', executable='turtlesim_node', ) launch_description = LaunchDescription([turtle_node]) return launch_descriptionDefines a variable turtle_node as the return value of a Node start, calls the node function, launches two important parameters, package and executable.
- package: indicates the name of the function package.
- executable: indicates the name of the program to be executed.
The variable launch_description is then defined as the return value of the LaunchDescription function, which can be added later if multiple nodes are started.
xxxxxxxxxxlaunch_description = LaunchDescription([turtle_node])
Finally, return launch_description.
3. Write multiple Node launches
Terminal input,
xxxxxxxxxxcd ~/ros2_ws/src/topic_pkg/launchgedit multi_node_launch.pyCopy the following into the file,
xxxxxxxxxxfrom launch import LaunchDescriptionfrom launch_ros.actions import Nodedef generate_launch_description(): pub_node = Node( package='topic_pkg', executable='publisher_demo', output='screen' ) sub_node = Node( package='topic_pkg', executable='subscriber_demo', output='screen' ) launch_description = LaunchDescription([pub_node,sub_node]) return launch_description3.1. Compile the workspace
Terminal input,
xxxxxxxxxxcd ~/ros2_wscolcon build
After compiling, refresh the environment variables in the workspace,
xxxxxxxxxxsource ~/ros2_ws/install/setup.bash
3.2. Run the program
Terminal input,
xxxxxxxxxxros2 launch topic_pkg multi_node_launch.py
The terminal does not print content, we can check which nodes start to verify whether there is a successful start, terminal input,
xxxxxxxxxxros2 node list

As can be seen from the figure above, two nodes are started, corresponding to the two programs in the launch file.
3.3 Source code analysis
It's roughly the same as simple_node_launch.py, but with an extra node and an extra node in launch_description = LaunchDescription([pub_node,sub_node]).
4. Topic name mapping in launch file
Terminal input,
xxxxxxxxxxcd ~/ros2_ws/src/topic_pkg/launchgedit remap_name_launch.py
Copy the following into the file,
xxxxxxxxxxfrom launch import LaunchDescriptionfrom launch_ros.actions import Nodedef generate_launch_description(): turtle_node = Node( package='turtlesim', executable='turtlesim_node', remappings=[("/turtle1/cmd_vel", "/cmd_vel")] ) launch_description = LaunchDescription([turtle_node]) return launch_description4.1. Compile the workspace
Terminal input,
xxxxxxxxxxcd ~/ros2_wscolcon build
After compiling, refresh the environment variables in the workspace,
xxxxxxxxxxsource ~/ros2_ws/install/setup.bash
4.2. Run the program
Let's see what the speed of the baby turtle is before we remap the topic what the topic name is, terminal input,
xxxxxxxxxxros2 launch topic_pkg single_node_launch.pyros2 topic list
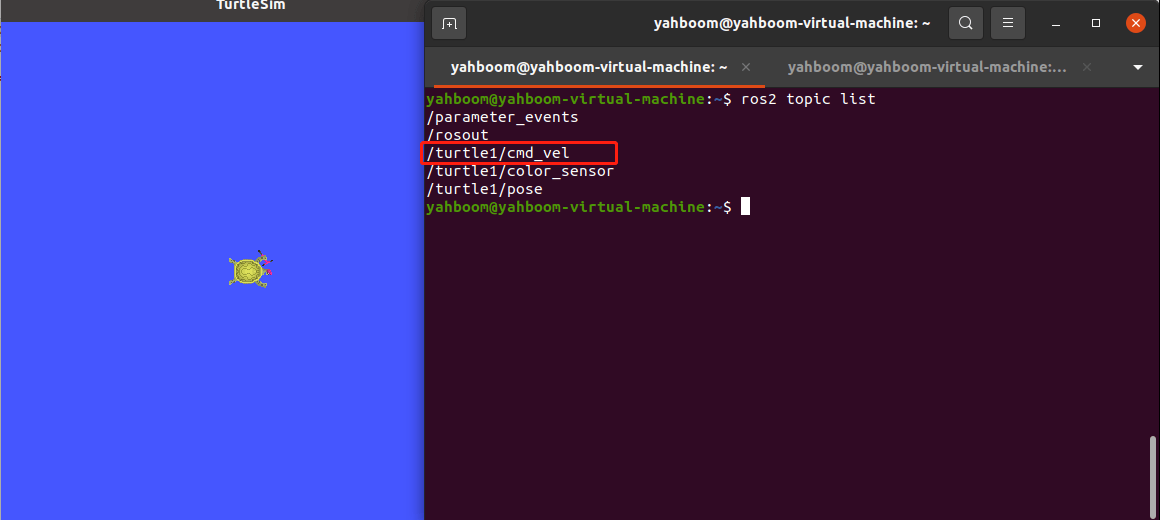
The topic here is /turtle1/cmd_vel.
Run the program after remapping the topic, see what the speed topic name of the turtle subscription is, terminal input,
xxxxxxxxxxros2 launch topic_pkg remap_name_launch.pyros2 topic list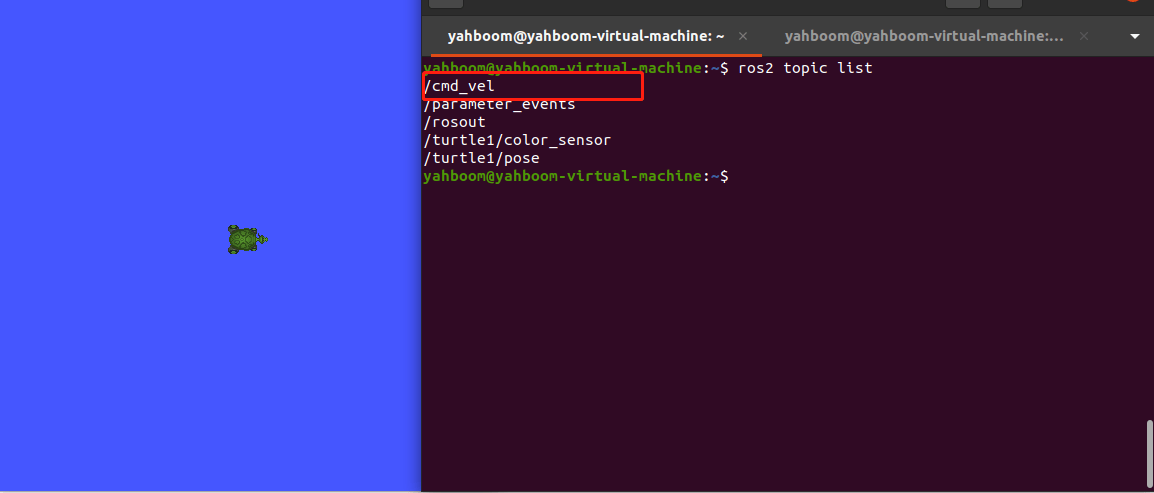
As can be seen from the figure above, the speed topic name is remapped, and the mapped speed topic name of the baby turtle is /cmd_vel.
4.3 Source code analysis
The original single_node_launch.py has been modified, mainly adding the following parts:
xxxxxxxxxxremappings=[("/turtle1/cmd_vel", "/cmd_vel")]
This is where the original /turtle1/cmd_vel is remapped to /cmd_vel. The original topic name in the front, and the topic name we want to change into the back.
5. launch file launch the launch file
Terminal input,
xxxxxxxxxxcd ~/ros2_ws/src/topic_pkg/launchgedit include_launch.py
Copy the following into the file,
xxxxxxxxxximport osfrom ament_index_python.packages import get_package_share_directoryfrom launch import LaunchDescriptionfrom launch.actions import IncludeLaunchDescriptionfrom launch.launch_description_sources import PythonLaunchDescriptionSourcedef generate_launch_description(): node1 = IncludeLaunchDescription( PythonLaunchDescriptionSource([os.path.join( get_package_share_directory('topic_pkg'), 'launch'), '/multi_node_launch.py']) ) node2 = IncludeLaunchDescription( PythonLaunchDescriptionSource([os.path.join( get_package_share_directory('topic_pkg'), 'launch'), '/single_node_launch.py']) ) return LaunchDescription([node1,node2])5.1. Compile the workspace
Terminal input,
xxxxxxxxxxcd ~/ros2_wscolcon build
After compiling, refresh the environment variables in the workspace,
xxxxxxxxxxsource ~/ros2_ws/install/setup.bash
5.2. Run the program
Terminal input,
xxxxxxxxxxros2 launch topic_pkg include_launch.py
The launch file will contain two launch files, simple_node_launch.py and multi_node_launch.py. You can check whether the nodes of these launch files are started by the following command, terminal input,
xxxxxxxxxxros2 node list

Three nodes were indeed started, so it was successful.
5.3 Source code analysis
xxxxxxxxxx#导入必要的库文件# Import the necessary library filesfrom ament_index_python.packages import get_package_share_directoryfrom launch import LaunchDescriptionfrom launch.actions import IncludeLaunchDescriptionfrom launch.launch_description_sources import PythonLaunchDescriptionSourcenode1 = IncludeLaunchDescription( PythonLaunchDescriptionSource([os.path.join( get_package_share_directory('topic_pkg'), 'launch'), '/multi_node_launch.py']) )- os.path. join(get_package_share_directory('topic_pkg') : obtains the location of the function package, where 'topic_pkg' is the name of the function package.
- launch') : indicates the folder where the launch file is stored under the function package.
- /multi_node_launch.py' : indicates the name of the launch file under the launch file in the function package folder, which is /multi_node_launch.py in the example.
6. Configure rosparam with launch file parameters
Terminal input,
xxxxxxxxxxcd ~/ros2_ws/src/topic_pkg/launchgedit param_launch.py
Copy the following into the file,
xxxxxxxxxxfrom launch import LaunchDescriptionfrom launch.actions import DeclareLaunchArgumentfrom launch.substitutions import LaunchConfiguration, TextSubstitutionfrom launch_ros.actions import Nodedef generate_launch_description(): background_r_launch_arg = DeclareLaunchArgument( 'background_r', default_value=TextSubstitution(text='0')) background_g_launch_arg = DeclareLaunchArgument( 'background_g', default_value=TextSubstitution(text='225')) background_b_launch_arg = DeclareLaunchArgument( 'background_b', default_value=TextSubstitution(text='0')) return LaunchDescription([ background_r_launch_arg, background_g_launch_arg, background_b_launch_arg, Node( package='turtlesim', executable='turtlesim_node', name='sim', parameters=[{ 'background_r':LaunchConfiguration('background_r'), 'background_g':LaunchConfiguration('background_g'), 'background_b':LaunchConfiguration('background_b'), }] ) ]) 6.1. Compile the workspace
Terminal input,
xxxxxxxxxxcd ~/ros2_wscolcon build
After compiling, refresh the environment variables in the workspace,
xxxxxxxxxxsource ~/ros2_ws/install/setup.bash
6.2. Run the program
Terminal input,
xxxxxxxxxxros2 launch topic_pkg param_launch.py
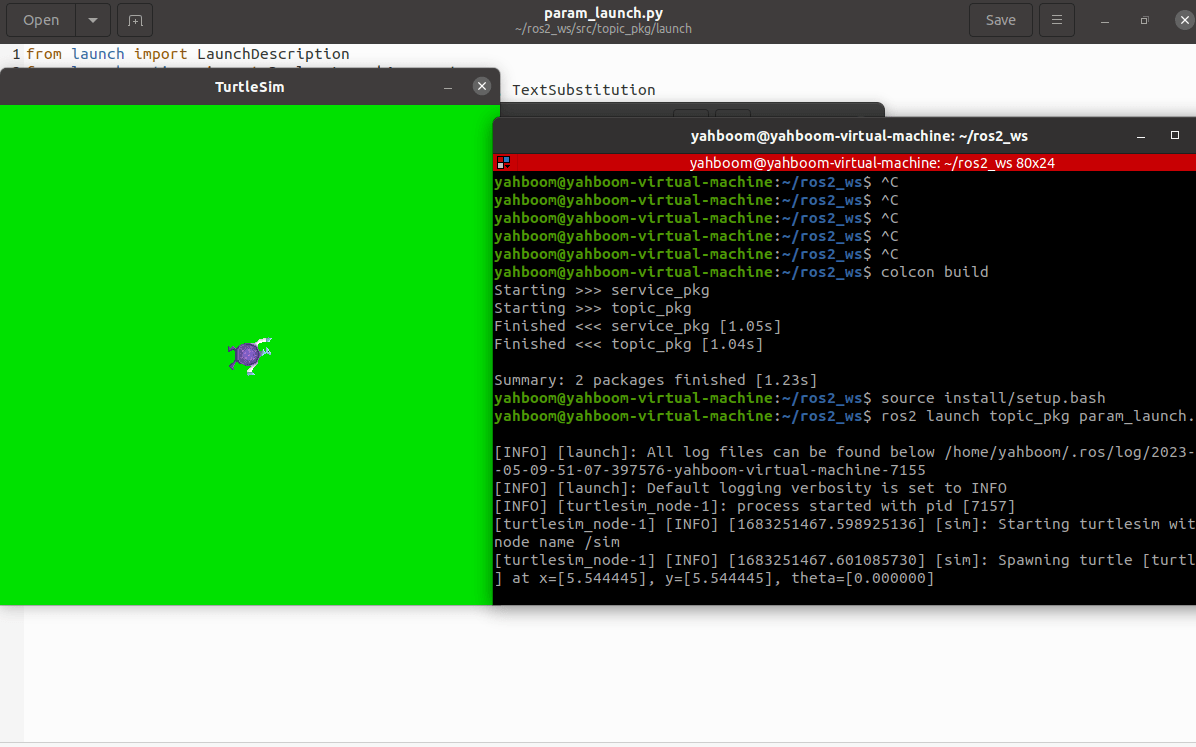
After the program runs, it will load the set parameters, modify the default RGB parameters, and change the color of the background board.
6.3 Source code analysis
xxxxxxxxxxfrom launch.actions import DeclareLaunchArgument # 声明launch文件内使用的Argument类# Declares the Argument class used in the launch filebackground_r_launch_arg = DeclareLaunchArgument( 'background_r', default_value=TextSubstitution(text='0')) # 创建一个Launch文件内参数background_r # Creates a Launch file with the background_r parameter 'background_r', default_value=TextSubstitution(text='0')) # 创建一个Launch文件内参数background_g # Creates a Launch file with the background_g parameter 'background_r', default_value=TextSubstitution(text='0')) # 创建一个Launch文件内参数background_b # Creates a Launch file with the background_b argument background_r_launch_arg, # 调用以上创建的参数 # calls the parameters created above background_g_launch_arg, background_b_launch_arg, parameters=[{ # ROS参数列表# ROS parameter list 'background_r': LaunchConfiguration('background_r'), # 创建参数background_r # Create parameter background_r 'background_g': LaunchConfiguration('background_g'), # 创建参数background_g # Create parameter background_g 'background_b': LaunchConfiguration('background_b'), # 创建参数background_b # Create parameter background_bargument and param are both parameters, but argument is passed in the launch file, and param is passed in the node program.
7. launch file load parameter configuration table
First create a parameter table, terminal input,
xxxxxxxxxxcd ~/ros2_ws/src/topic_pkgmkdir configcd configgedit turtle_config.yaml
Copy the contents into the turtle_config.yaml file,
xxxxxxxxxxsim ros__parameters background_r0 background_g0 background_b7Save and exit, then modify the setup.py file, the path to load the parameter file, terminal input,
xxxxxxxxxxcd ~/ros2_ws/src/topic_pkggedit setup.py
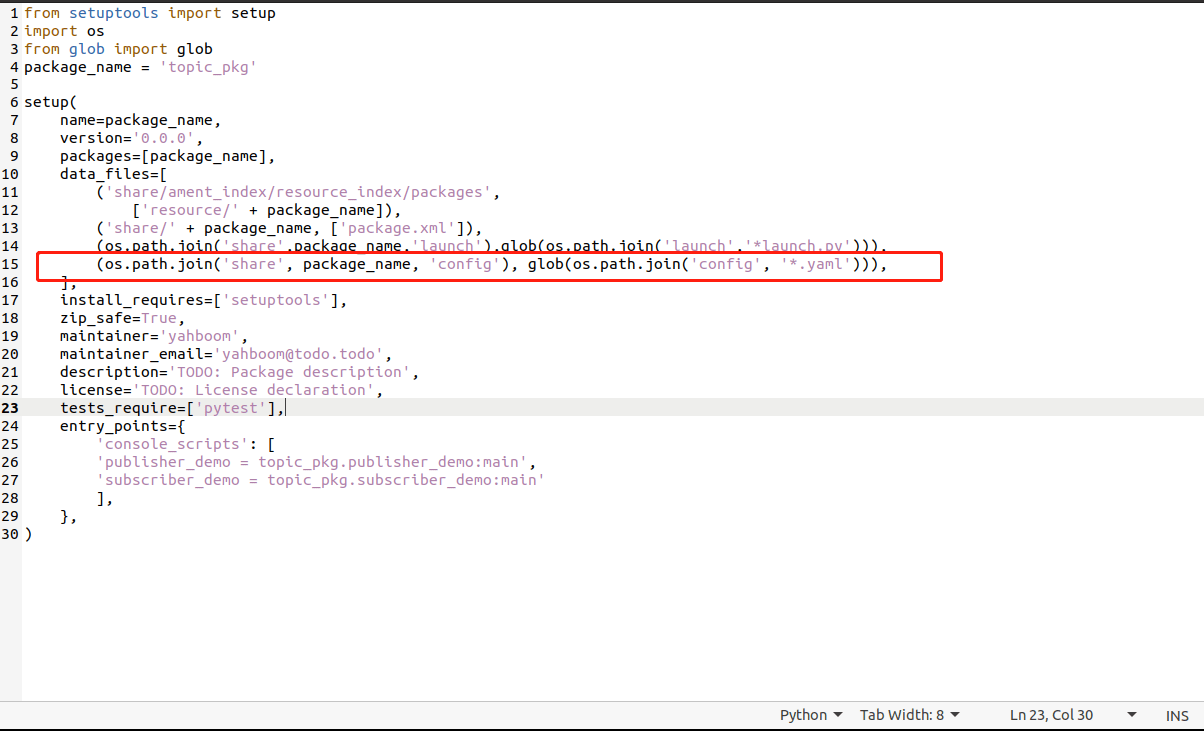
In the position shown in the above picture, add the following,
xxxxxxxxxx(os.path.join('share', package_name, 'config'), glob(os.path.join('config', '*.yaml'))),Save and exit, finally write the launch file, terminal input,
xxxxxxxxxxcd ~/ros2_ws/src/topic_pkg/launchgedit param_config_launch.py
Copy the following into the file,
xxxxxxxxxximport osfrom launch import LaunchDescriptionfrom launch_ros.actions import Nodefrom ament_index_python.packages import get_package_share_directorydef generate_launch_description(): config = os.path.join( get_package_share_directory('topic_pkg'), 'config', 'turtle_config.yaml' ) return LaunchDescription([ Node( package='turtlesim', executable='turtlesim_node', name='sim', parameters=[config] ) ])
7.1. Compile the workspace
Terminal input,
xxxxxxxxxxcd ~/ros2_wscolcon build
After compiling, refresh the environment variables in the workspace,
xxxxxxxxxxsource ~/ros2_ws/install/setup.bash
7.2. Run the program
Terminal input,
xxxxxxxxxxros2 launch topic_pkg param_config_launch.py
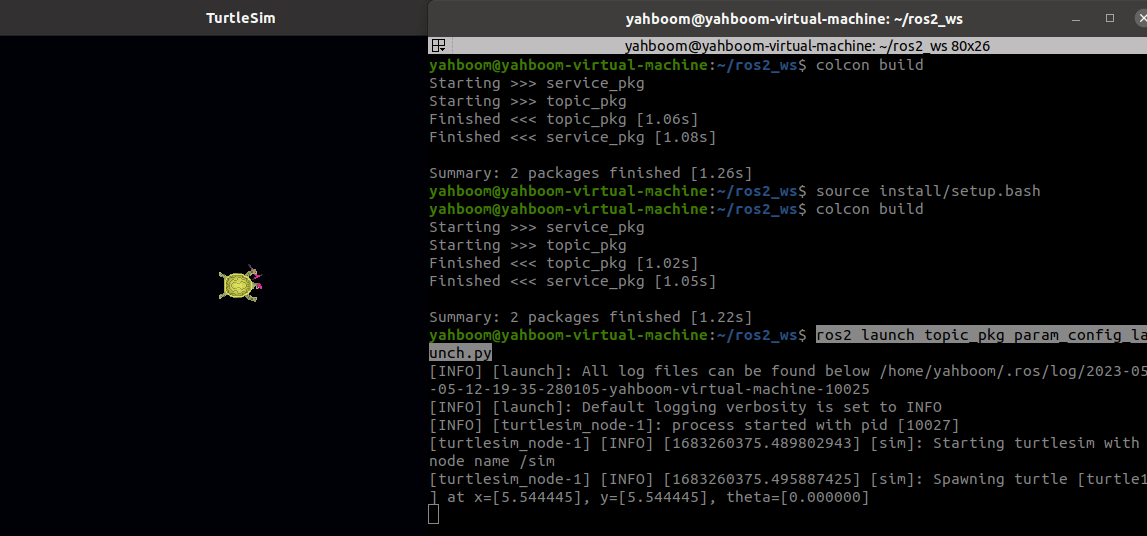
Run the program to get the turtle and the background color is set to black by parameter.
7.3 Source code analysis
xxxxxxxxxx#找到参数文件位置# Find the parameter file locationconfig = os.path.join( get_package_share_directory('topic_pkg'), 'config', 'turtle_config.yaml' )#加载参数文件# Load parameter fileparameters=[config]Let's look at the parameter file turtle_config.yaml,
xxxxxxxxxxsim ros__parameters background_r0 background_g0 background_b7The location of the parameter file is ~/ros2_ws/src/topic_pkg/config
- sim: indicates the node name
- ros__parameters: indicates the ros parameter, which is fixed
- background_r Specifies the parameter name. The following value is the parameter setting value