1. Camera usage
How to use the camera
Official website link: https://orbbec3d.com/develop/
Gemini 335 camera: https://github.com/orbbec/OrbbecSDK
Astra_Pro2 camera: https://github.com/orbbec/OrbbecSDK
Ordinary camera: https://github.com/bosch-ros-pkg/usb_cam.git
Gemini 330 series documents: https://www.orbbec.com.cn/index/Gemini330/info.html?cate=119&id=74
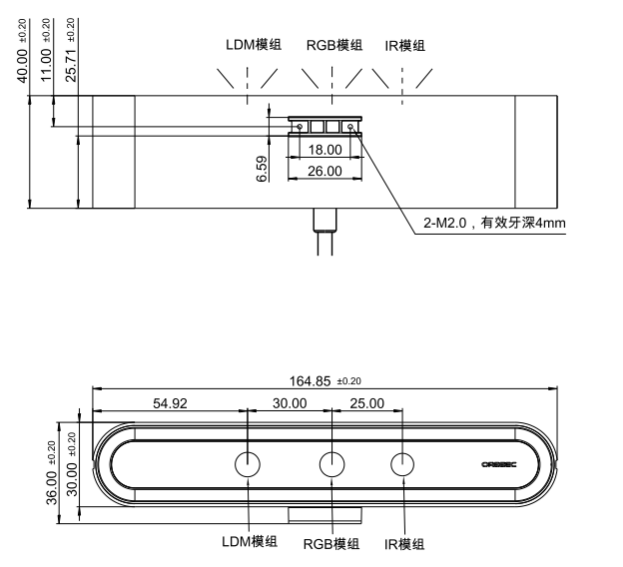
Astra_Pro2 camera specification diagram
Driver compilation
Installation dependencies:
xxxxxxxxxx# Assuming you have already set up the ROS environment, the same as belowsudo apt install libgflags-dev ros-$ROS_DISTRO-image-geometry ros-$ROS_DISTRO-camera-info-manager \ ros-$ROS_DISTRO-image-transport ros-$ROS_DISTRO-image-publisher libgoogle-glog-dev libusb-1.0-0-dev libeigen3-dev \ ros-$ROS_DISTRO-diagnostic-upda ter ros-$ROS_DISTRO-diagnostic-msgs ``` SDK path: ``` /home/yahboom/YBAMR-COBOT-EDU-00001/src/yahboom_navrobo_core/vision/OrbbecSDK_ROS ``` ROS driver compilation ```shell cd /home/yahboom/YBAMR-COBOT-EDU-00001catkin buildInstall udev rules
xxxxxxxxxxcd /home/yahboom/YBAMR-COBOT-EDU-00001/src/yahboom_navrobo_core/vision/OrbbecSDK_ROS/scripts/sudo cp 99-obsensor-libusb.rules /etc/udev/rules.d/99-obsensor-libusb.rulessudo udevadm control --reload && sudo udevadm triggerCamera startup
Note: The camera service of a normal vehicle will start automatically. If you want to start the camera separately, please turn off the chassis service.
xxxxxxxxxxsudo supervisorctl stop ChassisServer
xxxxxxxxxxcd /home/yahboom/YBAMR-COBOT-EDU-00001/source ./install/setup.bashroslaunch orbbec_camera gemini_330_series.launch #Gemini 330roslaunch orbbec_camera astra_pro2.launch #Astra_Pro 2Camera View
For easy observation, you can view it through the vehicle's own web service. Connect to the vehicle's Wi-Fi: yahboom_navrob Password: yahboom890729
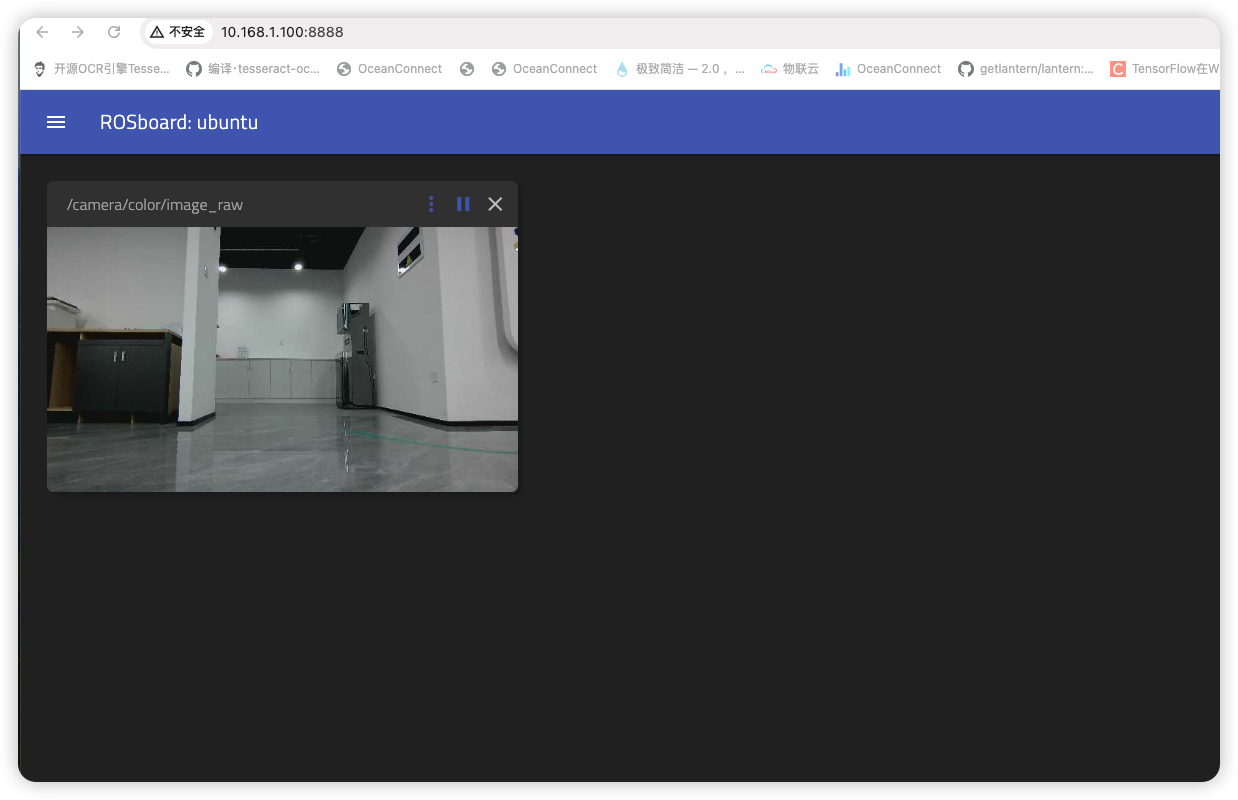
Then enter the address in the browser: http://10.168.1.100:8888
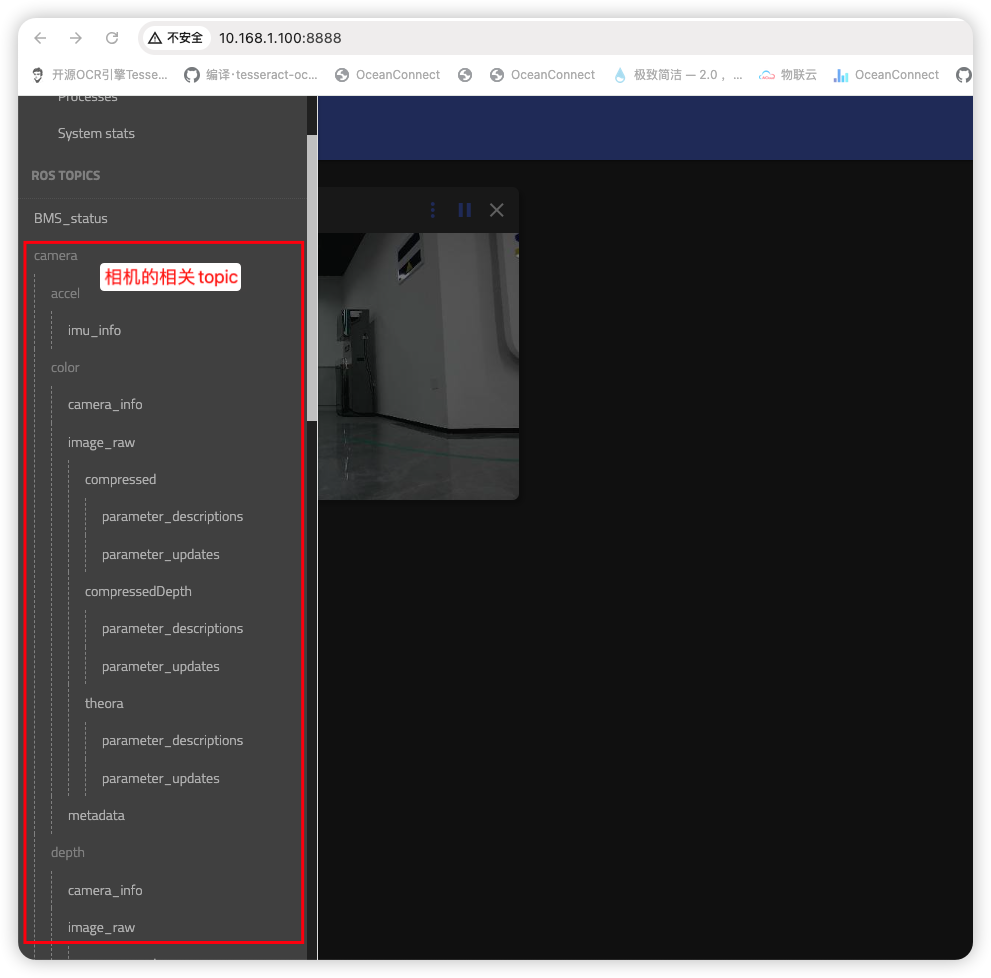
Click image_raw to view the current color image.
You can also use the rviz tool to view
Enter the command,
xxxxxxxxxxrviz
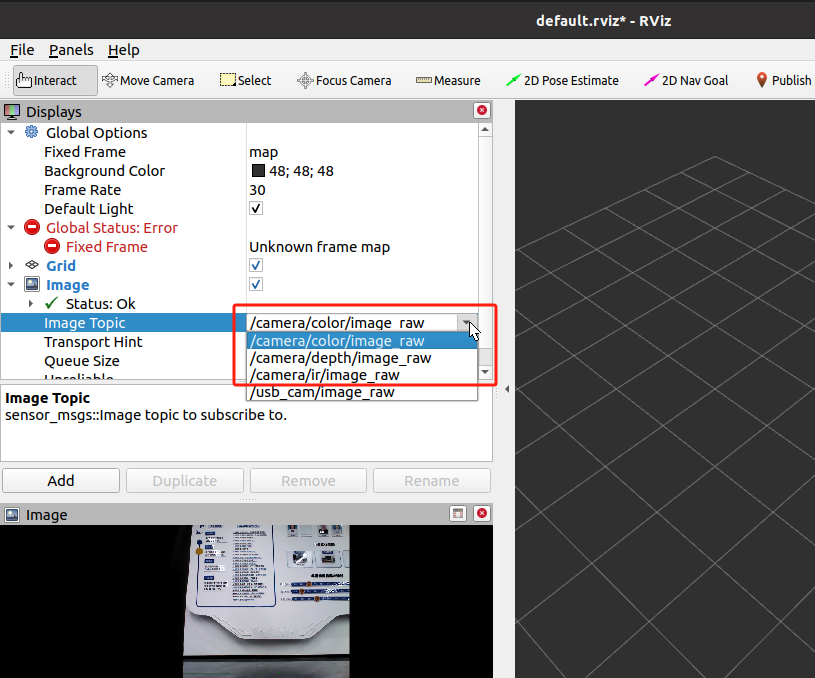
You can select color, depth, or infrared topic display here
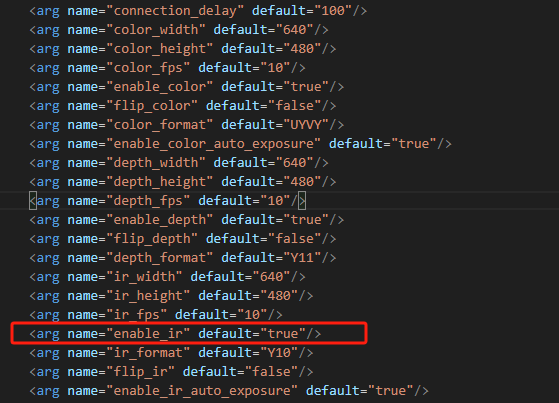
If you want to turn on the infrared camera, you need to find the launch file of the camera and turn on this parameter. The default value is false
xxxxxxxxxx/home/yahboom/YBAMR-COBOT-EDU-00001/src/yahboom_navrobo_core/vision/OrbbecSDK_ROS/launch/