2.Posture detection
1.MediaPipe Pose
MediaPipe Pose is an ML solution for body pose tracking with high fidelity. Through BlazePose research, 33 3D coordinates and full background segmentation masks are inferred from RGB video frames. This study also provides dynamic support for the ML Kit pose detection API.
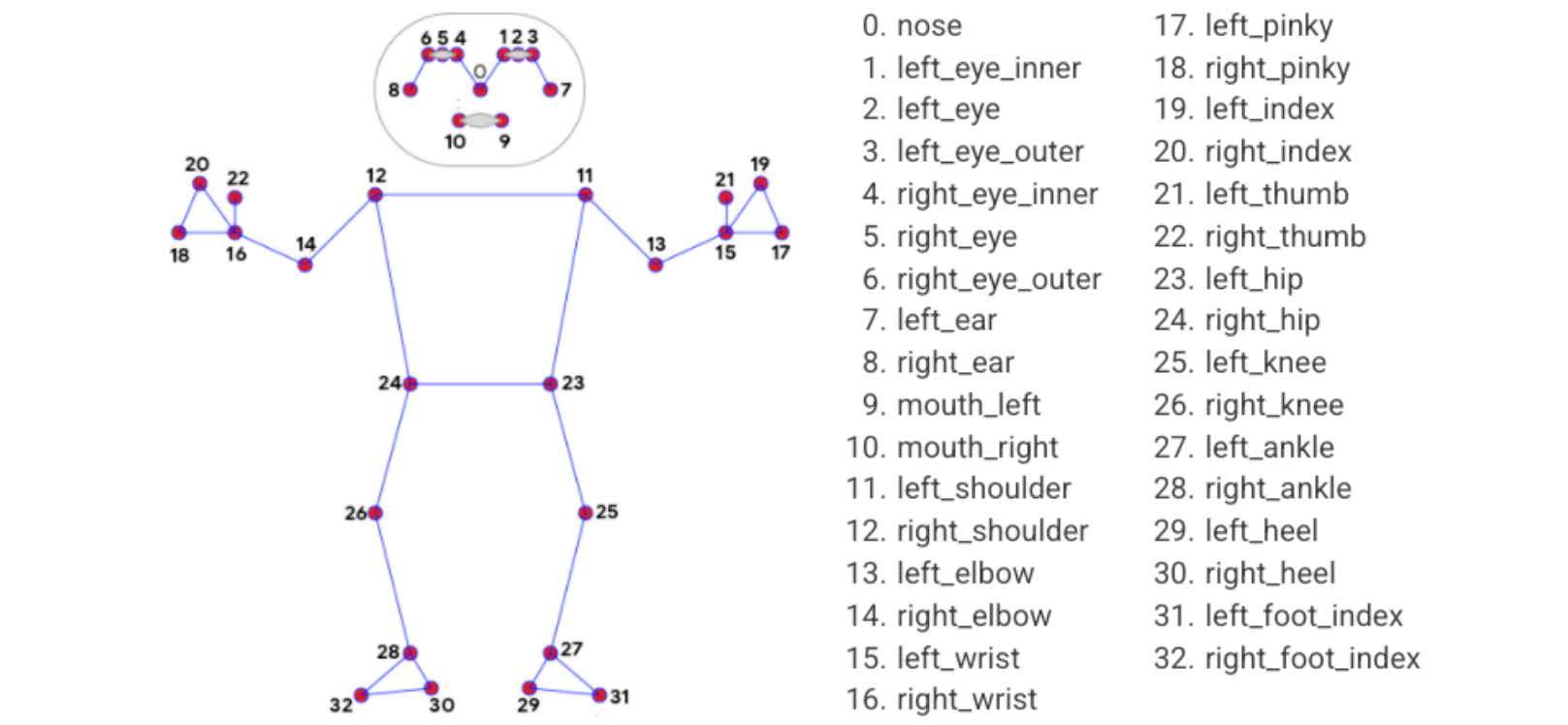
The landmark model in the MediaPipe pose predicted the positions of 33 pose coordinates (see figure below).
2. Posture detection
1) Start up
Input following command:
ros2 run yahboomcar_mediapipe 02_PoseDetector
2) Code
Code path: ~/orbbec_ws/src/yahboomcar_mediapipe/yahboomcar_mediapipe/02_PoseDetector.py
x#!/usr/bin/env python3# encoding: utf-8
#import ros libimport rclpyfrom rclpy.node import Nodefrom geometry_msgs.msg import Pointimport mediapipe as mp#import define msgfrom yahboomcar_msgs.msg import PointArray#import commom libimport cv2 as cvimport numpy as npimport timeprint("import done")
class PoseDetector(Node): def __init__(self, name,mode=False, smooth=True, detectionCon=0.5, trackCon=0.5): super().__init__(name) self.mpPose = mp.solutions.pose self.mpDraw = mp.solutions.drawing_utils self.pose = self.mpPose.Pose( static_image_mode=mode, smooth_landmarks=smooth, min_detection_confidence=detectionCon, min_tracking_confidence=trackCon ) self.pub_point = self.create_publisher(PointArray,'/mediapipe/points',1000) self.lmDrawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 0, 255), thickness=-1, circle_radius=6) self.drawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 255, 0), thickness=2, circle_radius=2)
def pubPosePoint(self, frame, draw=True): pointArray = PointArray() img = np.zeros(frame.shape, np.uint8) img_RGB = cv.cvtColor(frame, cv.COLOR_BGR2RGB) self.results = self.pose.process(img_RGB) if self.results.pose_landmarks: if draw: self.mpDraw.draw_landmarks(frame, self.results.pose_landmarks, self.mpPose.POSE_CONNECTIONS, self.lmDrawSpec, self.drawSpec) self.mpDraw.draw_landmarks(img, self.results.pose_landmarks, self.mpPose.POSE_CONNECTIONS, self.lmDrawSpec, self.drawSpec) for id, lm in enumerate(self.results.pose_landmarks.landmark): point = Point() point.x, point.y, point.z = lm.x, lm.y, lm.z pointArray.points.append(point) self.pub_point.publish(pointArray) return frame, img
def frame_combine(slef,frame, src): if len(frame.shape) == 3: frameH, frameW = frame.shape[:2] srcH, srcW = src.shape[:2] dst = np.zeros((max(frameH, srcH), frameW + srcW, 3), np.uint8) dst[:, :frameW] = frame[:, :] dst[:, frameW:] = src[:, :] else: src = cv.cvtColor(src, cv.COLOR_BGR2GRAY) frameH, frameW = frame.shape[:2] imgH, imgW = src.shape[:2] dst = np.zeros((frameH, frameW + imgW), np.uint8) dst[:, :frameW] = frame[:, :] dst[:, frameW:] = src[:, :] return dst
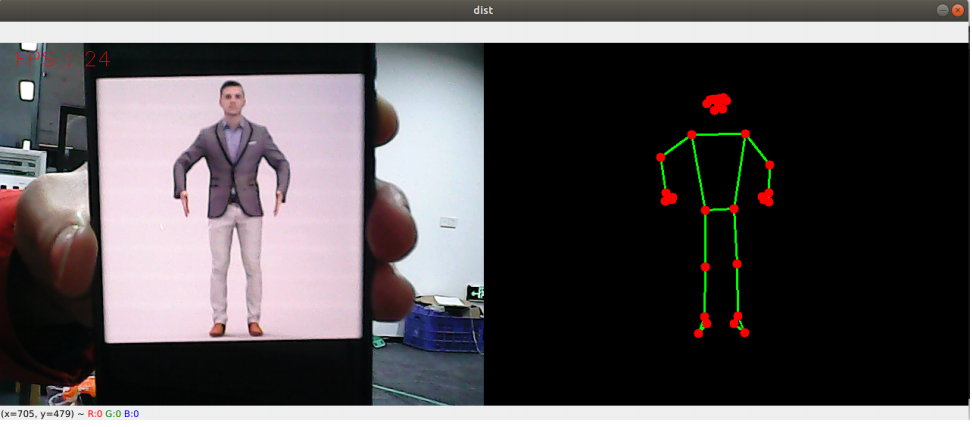
def main(): print("start it") rclpy.init() pose_detector = PoseDetector('pose_detector') capture = cv.VideoCapture(0) capture.set(6, cv.VideoWriter.fourcc('M', 'J', 'P', 'G')) capture.set(cv.CAP_PROP_FRAME_WIDTH, 640) capture.set(cv.CAP_PROP_FRAME_HEIGHT, 480) print("capture get FPS : ", capture.get(cv.CAP_PROP_FPS)) pTime = cTime = 0 index = 3 while capture.isOpened(): ret, frame = capture.read() # frame = cv.flip(frame, 1) frame, img = pose_detector.pubPosePoint(frame,draw=False) if cv.waitKey(1) & 0xFF == ord('q'): break cTime = time.time() fps = 1 / (cTime - pTime) pTime = cTime text = "FPS : " + str(int(fps)) cv.putText(frame, text, (20, 30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1) dist = pose_detector.frame_combine(frame, img) cv.imshow('dist', dist) # cv.imshow('frame', frame) # cv.imshow('img', img) capture.release() cv.destroyAllWindows()