7. Hector mapping algorithm
7. Hector mapping algorithm7.1. Introduction7.2. Use7.2.1. Start7.2.2. Controlling the robot7.2.3. Map saving7.3. Topics and services7.4. Configuration parameters7.5, TF transformation
hector_slam: http://wiki.ros.org/hector_slam
hector_slam/Tutorials: http://wiki.ros.org/hector_slam/Tutorials/SettingUpForYourRobot
hector_mapping: http://wiki.ros.org/hector_mapping
map_server: https://wiki.ros.org/map_server
7.1. Introduction
Features: hector_slam does not need to subscribe to odometry/odom messages. It uses the Gauss-Newton method and directly uses lidar to estimate odometry information. However, when the robot is fast, slipping will occur, causing deviations in the mapping effect and placing high demands on sensors. When building a map, set the car's rotation speed as low as possible.
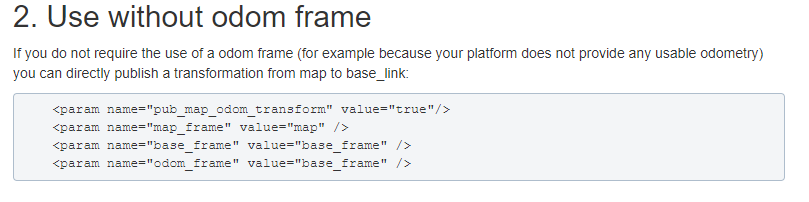
There is no method to use the odom coordinate system, taken from Wiki.
7.2. Use
Note: When building a map, the slower the speed, the better the effect (note that the rotation speed should be slower). If the speed is too fast, the effect will be poor.
According to different models, you only need to set the purchased model in [.bashrc], X1 (normal four-wheel drive) X3 (Mailun) Take X3 as an example
xxxxxxxxxx#Raspberry Pi 5 master needs to enter docker first, please perform this step#If running the script into docker fails, please refer to ROS/07, Docker tutorial~/run_docker.shOpen the [.bashrc] file
xxxxxxxxxxsudo vim .bashrc
Find the [ROBOT_TYPE] parameters and modify the corresponding car model
xxxxxxxxxxexport ROBOT_TYPE=X3 # ROBOT_TYPE: X1 X3 X3plus R2 X77.2.1. Start
Start the command (robot side). For the convenience of operation, this section takes [mono + laser + yahboomcar] as an example.
xxxxxxxxxxroslaunch yahboomcar_nav laser_bringup.launch # laser + yahboomcarroslaunch yahboomcar_nav laser_usb_bringup.launch # mono + laser + yahboomcarroslaunch yahboomcar_nav laser_astrapro_bringup.launch # Astra + laser + yahboomcarMapping command (robot side)
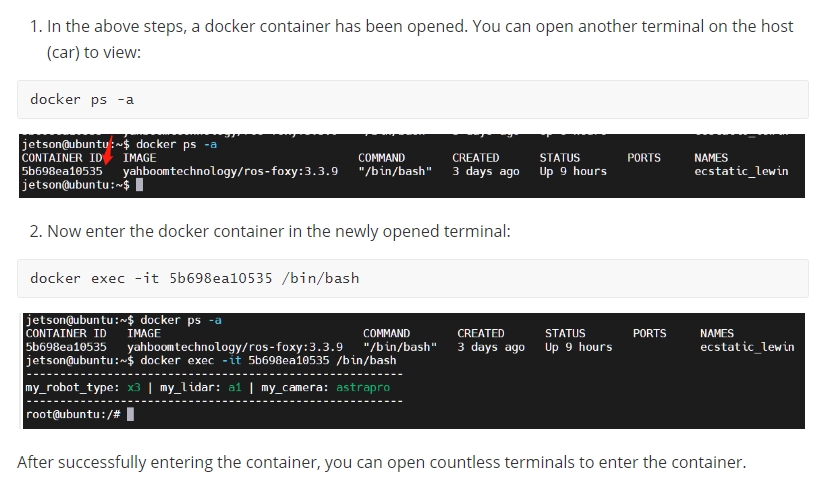
<PI5 needs to open another terminal to enter the same docker container
xxxxxxxxxxroslaunch yahboomcar_nav yahboomcar_map.launch use_rviz:=false map_type:=hector[use_rviz] parameter: whether to enable rviz visualization.
[map_type] parameter: Set the mapping algorithm [hector].
Turn on the visual interface (virtual machine side)
xxxxxxxxxxroslaunch yahboomcar_nav view_map.launch
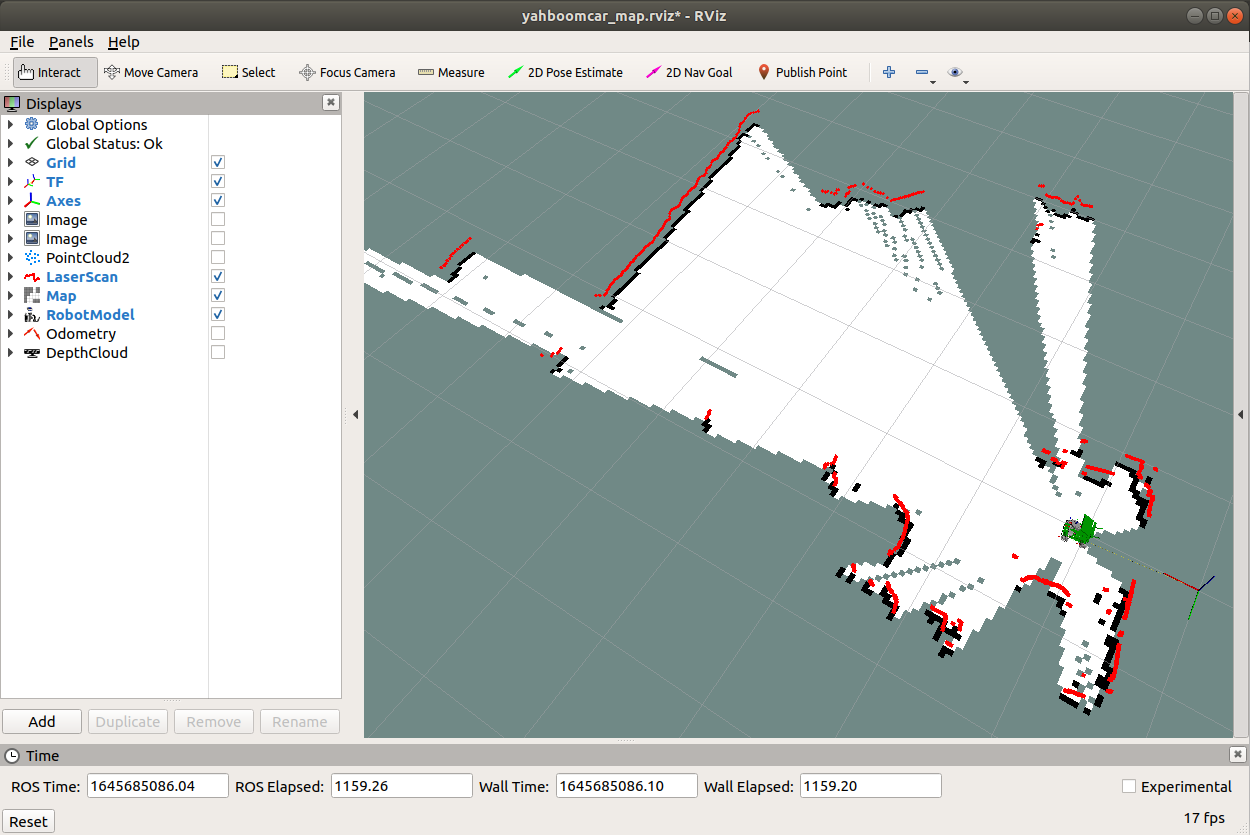
The gap at the back of the robot is due to the obstruction caused by the installation position of the display screen, so a certain range of radar data is blocked. The shielding range can be adjusted, or it can not be blocked according to the actual situation. For specific operations, see [01. Radar Basic Course].
7.2.2. Controlling the robot
Keyboard controls robot movement
xxxxxxxxxxrosrun teleop_twist_keyboard teleop_twist_keyboard.py # System integrationroslaunch yahboomcar_ctrl yahboom_keyboard.launch # CustomControl the robot movement with the handle
Make the robot cover the area to be mapped and the map should be as closed as possible.
There may be some scattered points during the mapping process. If the mapping environment is well closed, relatively regular, and the movement is slow, the scattering phenomenon will be much smaller.
7.2.3. Map saving
xxxxxxxxxxrosrun map_server map_saver -f ~/yahboomcar_ws/src/yahboomcar_nav/maps/my_map # The first waybash ~/yahboomcar_ws/src/yahboomcar_nav/maps/map.sh # The second wayThe map will be saved to the ~/yahboomcar_ws/src/yahboomcar_nav/maps/ folder, a pgm image and a yaml file.
map.yaml
xxxxxxxxxximage: map.pgmresolution: 0.05origin: [-15.4,-12.2,0.0]Negate: 0occupied_thresh: 0.65free_thresh: 0.196Parameter analysis:
image: The path of the map file, which can be an absolute path or a relative path.
resolution: resolution of the map, meters/pixel
Origin: 2D pose (x, y, yaw) in the lower left corner of the map. The yaw here is rotated counterclockwise (yaw=0 means no rotation). Many parts of the current system ignore the yaw value.
negate: whether to reverse the meaning of white/black and free/occupied (the interpretation of the threshold is not affected)
occupied_thresh: Pixels with an occupation probability greater than this threshold will be considered fully occupied.
free_thresh: Pixels with occupancy probability less than this threshold will be considered completely free.
7.3. Topics and services
| Topic Subscription | Type | Description |
|---|---|---|
| scan | sensor_msgs/LaserScan | Depth data of lidar scan |
| syscommand | std_msgs/String | System command. If the string equals "reset", the map and robot pose are reset to the initial state |
| Topic Post | Type | Description |
| map_metadata | nav_msgs/MapMetaData | Publish map Metadata |
| map | nav_msgs/OccupancyGrid | Publish map raster data |
| slam_out_pose | geometry_msgs/PoseStamped | Covariance-free robot pose estimation |
| poseupdate | geometry_msgs /PoseWithCovarianceStamped | Robot pose estimation with Gaussian uncertainty estimation |
| Service | Type | Description |
| dynamic_map | nav_msgs/GetMap | Get map data |
| reset_map | std_srvs/Trigger | Call this service to reset the map, and hector will create a brand new map from scratch. Note that this will not restart the robot's pose, it will restart from the last recorded pose. |
| pause_mapping | std_srvs/SetBool | Call this service to stop/start processing laser scans. |
| restart_mapping_with_new_pose | hector_mapping/ResetMapping | Call this service to reset the map, robot's pose, and resume the map (if paused) |
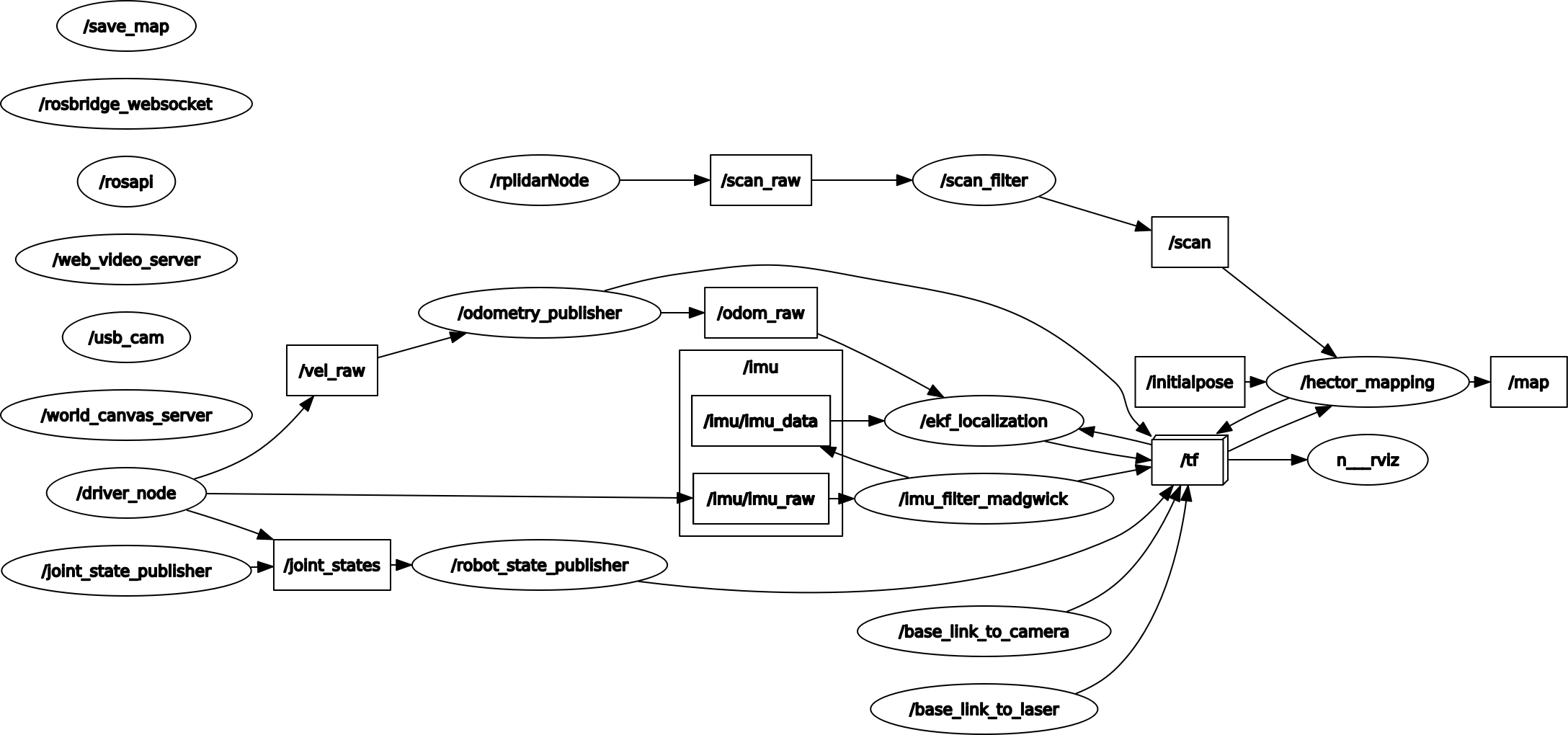
Node view
xxxxxxxxxxrqt_graph
7.4. Configuration parameters
| Parameters | Type | Default value | Description |
|---|---|---|---|
| ~base_frame | String | "base_link" | Robot base coordinate system, used for positioning and laser scanning data transformation |
| ~map_frame | String | "map" | The coordinate system of the map |
| ~odom_frame | string | "odom" | Odometer coordinate system (essentially the coordinate system pointed to by map) |
| ~map_resolution | Double | 0.025(m) | Map resolution, edge length of grid cells |
| ~map_size | Int | 1024 | The size of the map |
| ~map_start_x | double | 0.5 | /The position of the origin of map [0.0, 1.0] on the x-axis relative to the grid map |
| ~map_start_y | double | 0.5 | /The position of the origin of /map [0.0, 1.0] on the y-axis relative to the grid map |
| ~map_update_distance_thresh | double | 0.4(m) | The threshold for map update, which is calculated from the first update on the map until the straight distance reaches this parameter value and is updated again |
| ~map_update_angle_thresh | double | 0.9(rad) | The threshold for map update, starting from the first update on the map and updating again after the rotation reaches this parameter value |
| ~map_pub_period | double | 2.0 | Map release cycle |
| ~map_multi_res_levels | int | 3 | Map multi-resolution grid levels |
| ~update_factor_free | double | 0.4 | Used to update the map of free cells, the range is [0.0, 1.0] |
| ~update_factor_occupied | double | 0.9 | Used to update the map of occupied units, the range is [0.0, 1.0] |
| ~laser_min_dist | double | 0.4(m) | The minimum distance of laser scanning points. Scanning points smaller than this value will be ignored |
| ~laser_max_dist | double | 30.0(m) | The maximum distance of laser scanning points. Scanning points smaller than this value will be ignored |
| ~laser_z_min_value | double | -1.0(m) | Minimum height relative to the lidar, scan points below this value will be ignored |
| ~laser_z_max_value | double | 1.0(m) | The maximum height relative to the lidar, scan points above this value will be ignored |
| ~pub_map_odom_transform | bool | true | Whether to publish the coordinate transformation between map and odom |
| ~output_timing | bool | false | Process the output timing information of each laser scan through ROS_INFO |
| ~scan_subscribe_queue_size | int | 5 | Queue size for scan subscribers |
| ~pub_map_scanmatch_transform | bool | true | Whether to publish the coordinate transformation between scanmatcher and map |
| ~tf_map_scanmatch_transform_frame_name | String | "scanmatcher_frame" | The coordinate system name of scanmatcher |
7.5, TF transformation
| Required TF transformation | Description |
|---|---|
| laser-->base_link | Usually a fixed value, the transformation between the lidar coordinate system and the base coordinate system, generally published by robot_state_publisher or static_transform_publisher |
| Released TF Transform | Description |
| map-->odom | The current estimate of the robot pose within the map frame (only provided if parameter "pub_map_odom_transform" is true). |
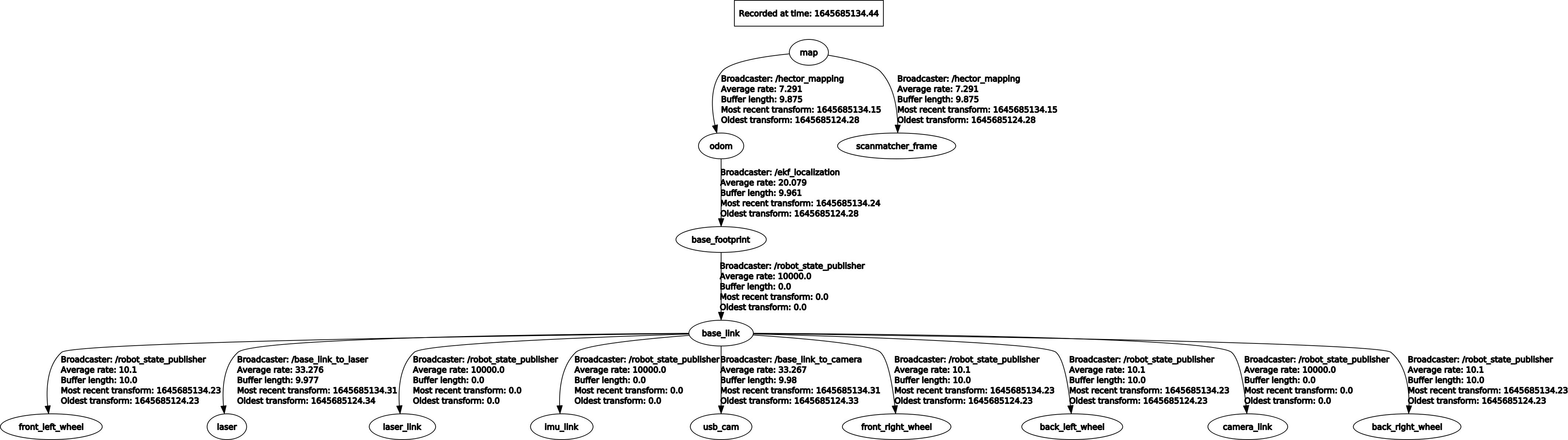
View tf tree
rosrun rqt_tf_tree rqt_tf_tree