Introduction to Jetson Nano
1.Introduction to JETSON NANO B01 official version
The physical image of the JETSON NANO B01 official version is shown in the following figure. One of them is the TF card interface, which can perform system image burning and writing; 2 is a 40PIN GPIO extension interface; 3 is a Micro USB interface used for data transmission or power supply; 4 is a Gigabit Ethernet port; 5 is the USB3.0 interface; 6 is an HDMI interface; 7 is the Display Port interface used to connect DP screens; 8 is the DC power interface; 9 is the interface for connecting the camera; 10 is the Poe interface.
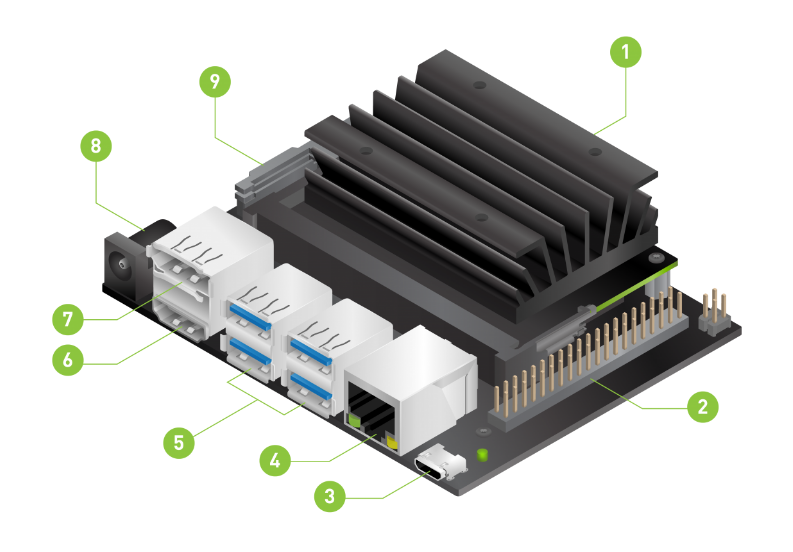
The JETSON NANO development kit covers an area of only 80x100mm and features four high-speed USB 3.0 ports, MIPI CSI-2 camera connectors, HDMI 2.0 and DisplayPort 1.3, Gigabit Ethernet, M.2 Key-E module, MicroSD card slot, and 40 pin GPIO connector. Ports and GPIO connectors are out of the box, featuring various popular peripheral devices, sensors, and out of the box projects, such as NVIDIA's 3D printable deep learning JetBot open-source on GitHub.
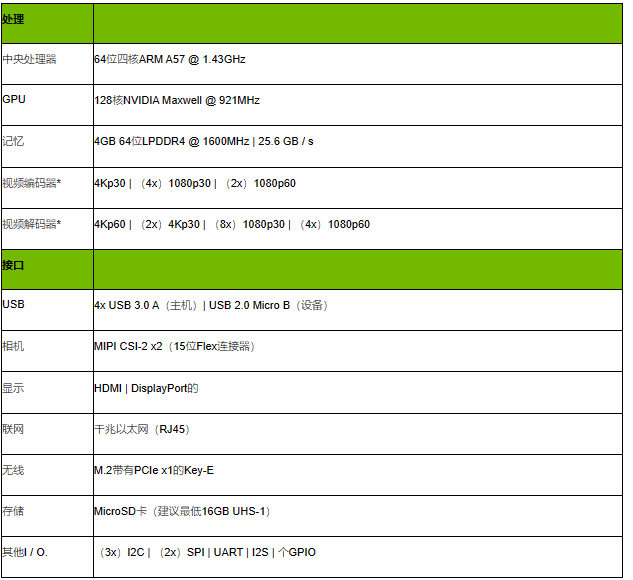
The official version can be started from a mobile MicroSD card, or by inserting a USB drive into a USB port. The system can be formatted and imaged from any PC with an SD card adapter through a USB drive. It can be conveniently powered through a Micro USB port or a 5V DC barrel jack adapter. The camera connector is compatible with affordable MIPI CSI sensors, including modules based on the 8MP IMX219 provided by JPS ecosystem partners. It also supports Raspberry Pi Camera Module v2, which includes driver support in JetPack. The following figure shows the technical specifications
2.Introduction to JETSON NANO B01 SUB version
The main differences between the JETSON NANO B01 SUB version development kit and the JETSON NANO B01 official version development kit are:
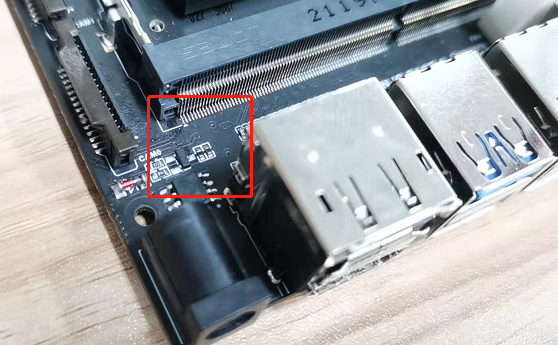
- The most obvious change is to cancel the TF card slot on the core board and replace it with a 16G space EMMC memory chip and a carrier board TF card slot. Since the 16G space is often not enough in actual development and applications, fortunately, the JETSON NANO B01 SUB version supports USB In the startup mode, you can burn the system to a 32G or larger USB flash drive for use.
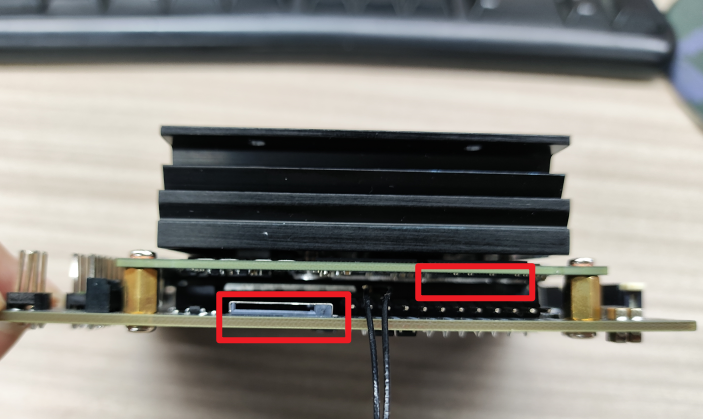
- Cancel the pin header switch of the DC power supply port, and you no longer have to worry about DC not supplying power due to not inserting the jumper cap.
Regarding the U disk boot method, there are the following points to note:
- The system version of the core board of the JETSON NANO B01 SUB version must correspond to the system version of the U disk. For example, the U disk has been burned with version V4.5.1, then the system version of the core board of the JETSON NANO B01 SUB version must also be V4.5.1. , and change "root=/dev/mmcblk0p1" in the extlinux.conf file in boot/extlinux in the EMMC system to "root=/dev/sda1", otherwise it cannot be booted through the USB-U disk. Or follow the burning guide to ignore version and configuration file modification issues.
- The idea of USB boot is to start the system in the core board first, and then boot the system from the core board to the U disk for startup.
- The system on the core board needs to use SDKManger to burn the system, and the system on the USB disk needs to use Win32DiskImager to burn the system.
3. Deep inference benchmark
Jetson Nano can run a variety of advanced networks, including full native versions of popular ML frameworks such as TensorFlow, PyTorch, Caffe/Cafe2, Keras, MXNet, and more. By implementing powerful functions such as image recognition, object detection and localization, pose estimation, semantic segmentation, video enhancement, and intelligent analysis, these networks can be used to build automated machines and complex AI systems
The following figure shows the inference benchmark test results of popular models provided online. Including performance from other platforms such as Raspberry Pi 3, Intel Neural Compute Stick 2, and Google Edge TPU Coral Dev Board:
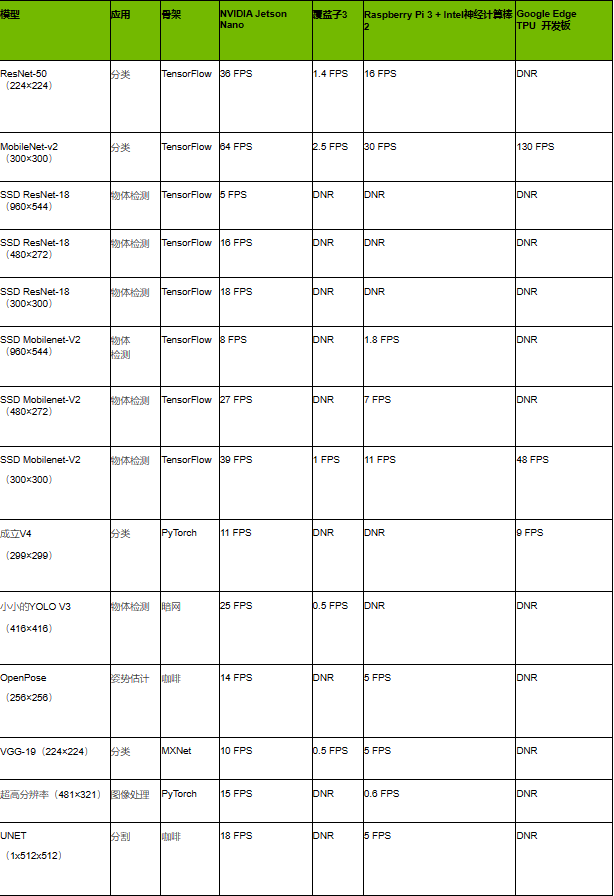
Due to limited memory capacity, unsupported network layer, or hardware/software limitations, DNR (not running) results occur frequently. Fixed function neural network accelerators typically support a relatively narrow set of use cases, with hardware supporting dedicated layer operations and requiring network weights and activation to adapt to limited on-chip caching to avoid significant data transmission losses. They may fall back onto the host CPU to run unsupported layers in the hardware, and may rely on model compilers that support reduced frame sets (such as TFLite)
Jetson Nano's flexible software and complete framework support, memory capacity, and unified memory subsystem enable it to run multiple different networks, achieving full HD resolution, including variable batch sizes on multiple sensor streams simultaneously. These benchmark tests represent some examples of popular networks, but users can deploy various models and custom architectures for Jetson Nano by accelerating performance. And Jetson Nano is not limited to DNN inference. Its CUDA architecture can be used for computer vision and digital signal processing (DSP), using algorithms including FFT, BLAS, and LAPACK operations, as well as user-defined CUDA kernels.
4.Multi stream video analysis
Jetson Nano can process up to 8 high-definition fully dynamic video streams in real-time and can be deployed as a low-power edge intelligent video analysis platform for network video recorders (NVRs), smart cameras, and IoT gateways. NVIDIA's DeepStream SDK uses ZeroCopy and TensorRT to optimize end-to-end inference pipelines for optimal performance on edge and local servers. Jetson Nano performs object detection on 8 1080p30 streams simultaneously, and the ResNet based model runs at full resolution with a throughput of 5 million pixels per second (MP/s).
The DeepStream application running on Jetson Nano runs ResNet based object detectors on eight independent 1080p30 video streams simultaneously.
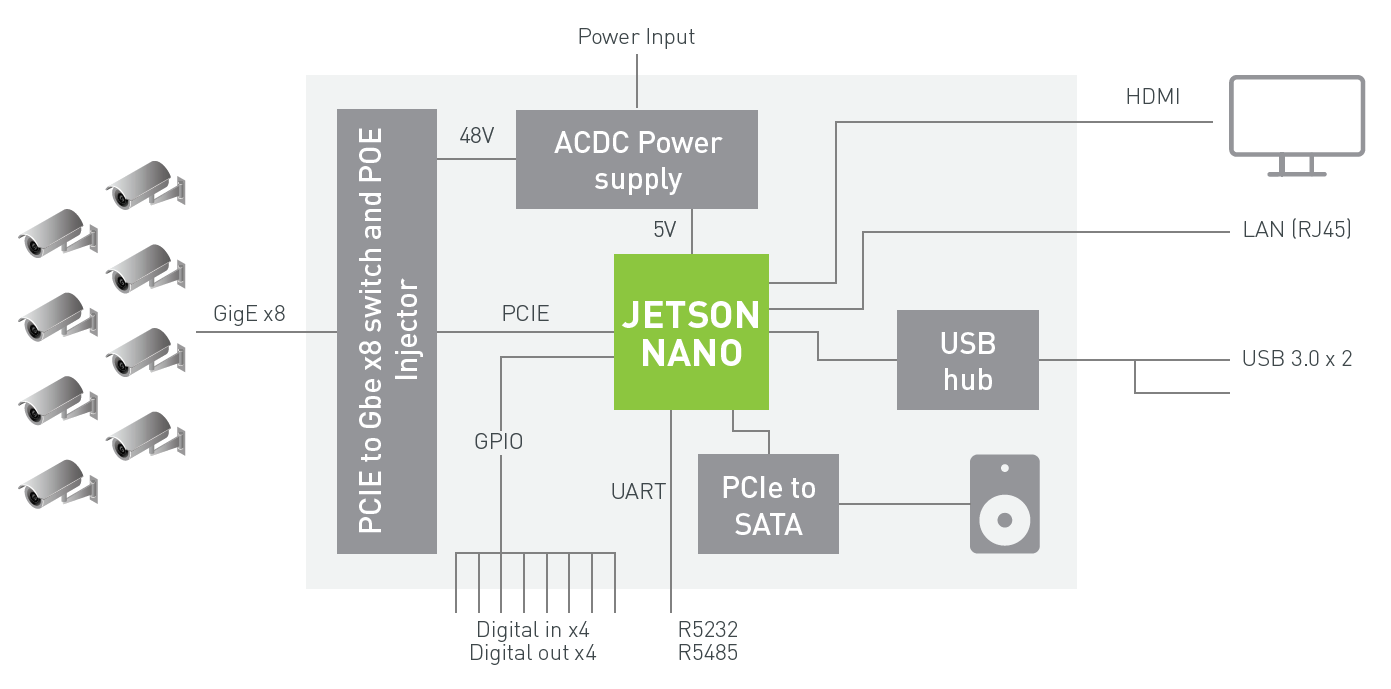
The following block diagram shows an example NVR architecture using Jetson Nano for deep learning analysis to ingest and process up to eight digital streams on a Gigabit Ethernet. The system can decode H.264/H.265 at 500 MP/s and encode H.264/H.265 videos at 250 MP/s.
5.AI Model Training
Developers who want to try training their own models can follow the complete "two day demonstration" tutorial, which covers image classification, object detection, and retraining and customization of semantic segmentation models with transfer learning. Transfer learning can accurately adjust the model weights of a specific dataset and avoid the need to train the model from scratch. Transmission learning is most effectively performed on PC or cloud instances connected to NVIDIA independent GPUs, as training requires more computing resources and time than inference.
However, since Jetson Nano can run complete training frameworks such as TensorFlow, PyTorch, and Caffe, it can also transfer students for those who may not be able to access another dedicated training machine and are willing to wait longer to obtain results. The following figure highlights the preliminary results of PyTorch's two-day transfer learning from training Alexnet and ResNet-18 on a 22.5GB ImageNet subset using Jetson Nano on 200 day images to demonstrate the tutorial:
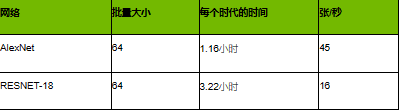
The time of each period is the time required to fully pass through the training dataset of 200K images. For available results, the classification network may require 2-5 periods, and production models should be trained on discrete GPU systems to obtain more periods until they reach maximum accuracy. However, Jetson Nano allows you to experience deep learning and artificial intelligence on low-cost platforms by retraining the network overnight. Not all custom datasets may be as large as the 22.5GB example used here. Therefore, the image per second represents the training performance of Jetson Nano, the time scaling of each period and the size of the dataset, the training batch size, and network complexity. Other models can also be retrained on Jetson Nano while increasing training time.