Connect to microROS agent
1. Start the agent
If you are using the factory virtual machine system, you can enter in the terminal:
sh ~/start_agent_computer.sh
If you use a third-party virtual machine system, you need to install the docker development environment first, open a terminal and enter:
xxxxxxxxxxdocker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:humble udp4 --port 8090 -v4
2. Connection agent
Turn on the power switch of the car and automatically connect to the agent. The connection is successful as shown in the figure below.
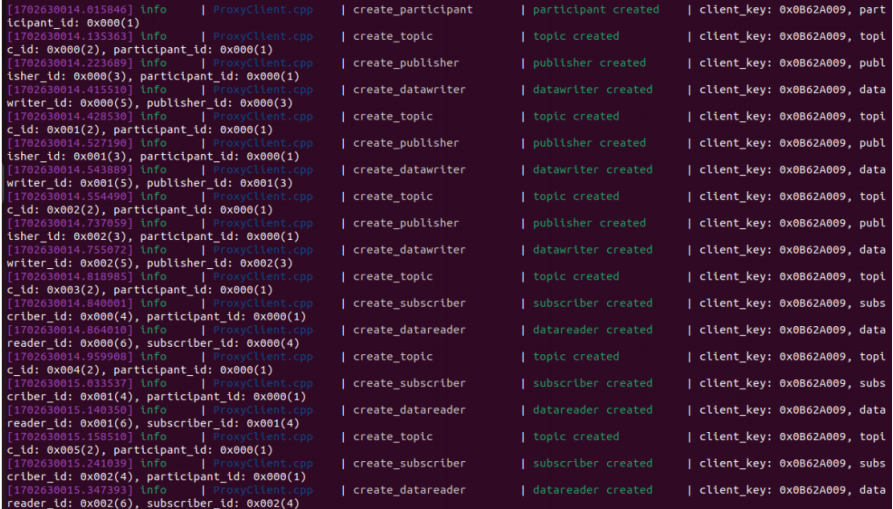
Note: If the connection is not successful, please check and confirm the configuration parameters of the robot, whether it can connect to the LAN normally, and whether the proxy IP address and port number correspond.
3. Test ROS nodes
Open the ROS2 terminal environment and enter the following command to view the /YB_Car_Node node name
xxxxxxxxxxros2 node list

If the /YB_Car_Node node cannot be searched, please check and confirm that the ROS DOMAIN ID of the .bashrc file on the virtual machine/computer is consistent with the one configured on the microROS control board before the node information can be searched.

