7. Perspective transformation
Perspective transformation is also called projection transformation. The affine transformation we often call is a special case of perspective transformation. The purpose of perspective transformation is to convert an object that is a straight line in reality into a straight line through perspective transformation, which may appear as a diagonal line in the picture. Perspective transformation can map a rectangle to an arbitrary quadrilateral. This technology will be used later when our robot drives autonomously.
Perspective transformation via function:
dst = cv2. warpPerspective(src, M, dsize[,flag, [,borderMode[,borderValue]]])
l dst: Output image after perspective transformation, dsize determines the actual size of the output.
l src: source image
l M: 3X3 transformation matrix
l dsize: Output image size.
l flags: Interpolation method, the default is INTER_LINEAR (bilinear interpolation). When it is WARP_INVERSE_MAP, it means that M is an inverse transformation, which can realize the inverse transformation from the target dst to src.
l borderMode: edge type. Default is BORDER_CONSTANT. When the value is BORDER_TRANSPARENT, the values in the target image are not changed. These values correspond to the outliers in the original image.
l borderValue: border value, default is 0.
Like affine transformation, OpenCV will still provide a function cv2.getPerspectiveTransform() to provide the transformation matrix above.
The function is as follows:
matAffine = cv2.getPerspectiveTransform(matSrc, matDst)
l matSrc: input the four vertex coordinates of the image.
l matDst: output the four vertex coordinates of the image.
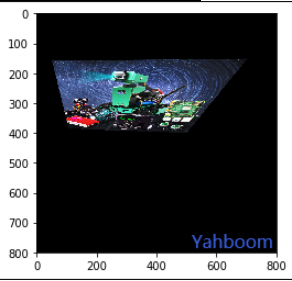
The code was run on jupyterlab
ximport cv2import numpy as npimport matplotlib.pyplot as pltimg = cv2.imread('yahboom.jpg',1)imgInfo = img.shapeheight = imgInfo[0]width = imgInfo[1]#src 4->dst 4 (upper left corner lower left corner upper right corner lower right corner)matSrc = np.float32([[200,100],[200,400],[600,100],[width-1,height-1]])matDst = np.float32([[200,200],[200,300],[500,200],[500,400]])#combinationmatAffine = cv2.getPerspectiveTransform(matSrc,matDst)# mat 1 src 2 dstdst = cv2.warpPerspective(img,matAffine,(width,height))img_bgr2rgb = cv2.cvtColor(dst, cv2.COLOR_BGR2RGB)plt.imshow(img_bgr2rgb)plt.show()