21.gazebo introduction
In the previous section, we talked about the URDF model to describe the robot. We also loaded the URDF model in rviz and used some plug-ins to make it move in rviz to achieve simulation. But often this is not enough to meet our simulation needs. We hope that the robot simulation environment can be as similar as possible to the actual environment. Then, the gazebo described in this course can meet the above needs.
21.1 Overview
Gazebo is a free robot simulation software that provides high-fidelity physical simulation, a complete set of sensor models, and a very user- and program-friendly interaction method. Functions that can accurately and efficiently simulate robot work in complex indoor and outdoor environments. By loading the model, an operating environment similar to the actual operating environment is constructed, the robot is loaded into it, and the program is run to realize simulation.
21.1.1 Install gazebo
According to the installed ROS version, here is noetic as an example, input in the terminal,
sudo apt install ros-noetic-gazebo-* -ysudo apt install gazebo11* -ysudo apt install libgazebo11-dev -y21.1.2 Run gazebo
After the installation is complete, enter in the terminal,
xxxxxxxxxxgazebo
21.1.3 GUI interface introduction
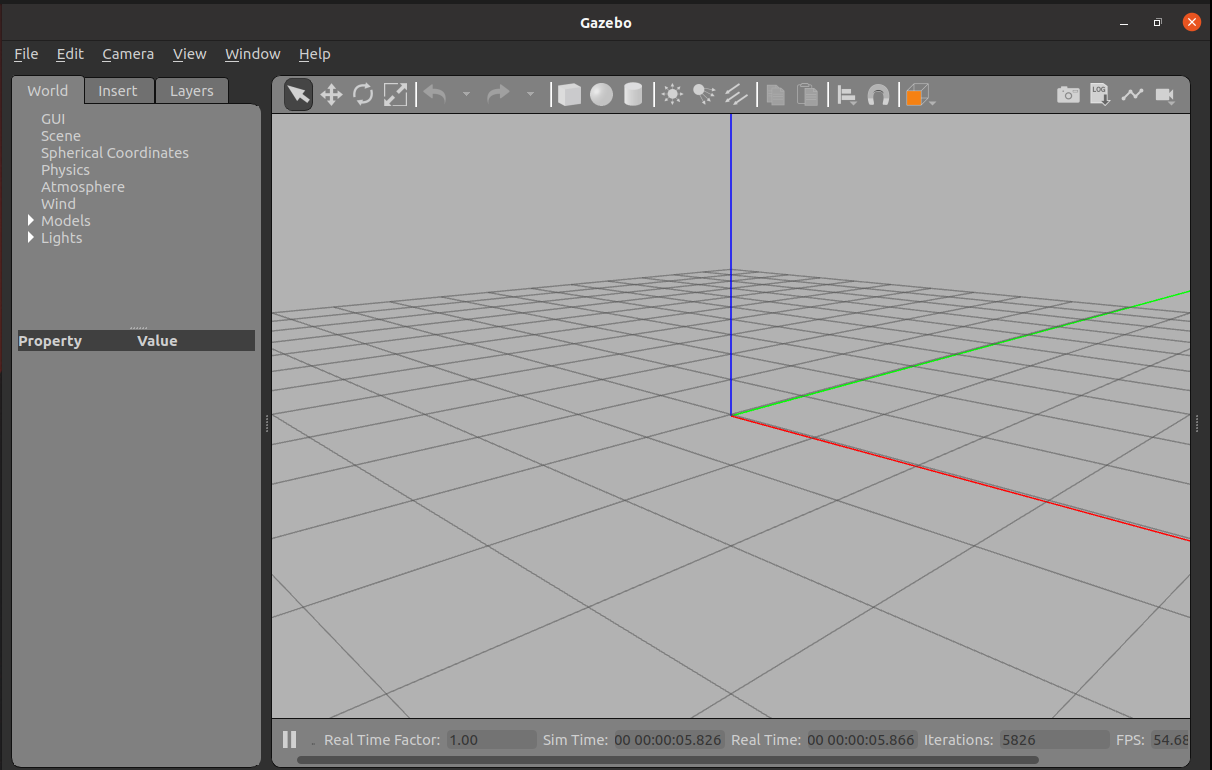
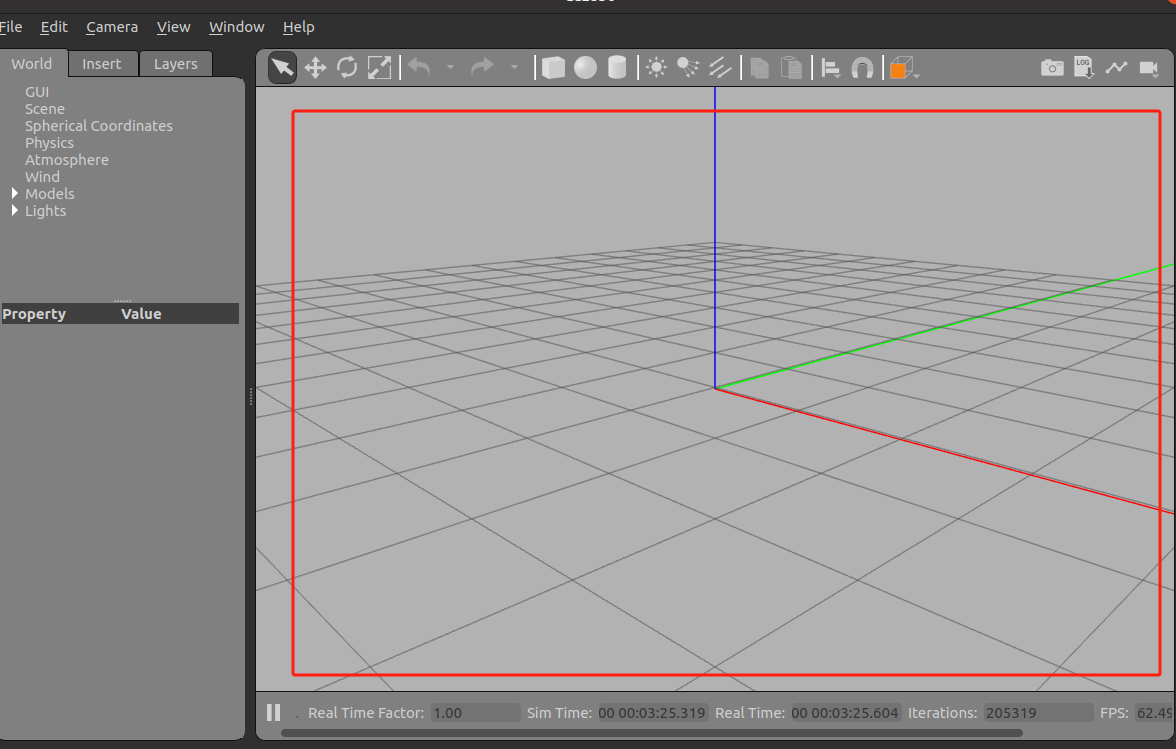
Scenes
The scene is the main part of the simulator, where the simulation model is displayed.
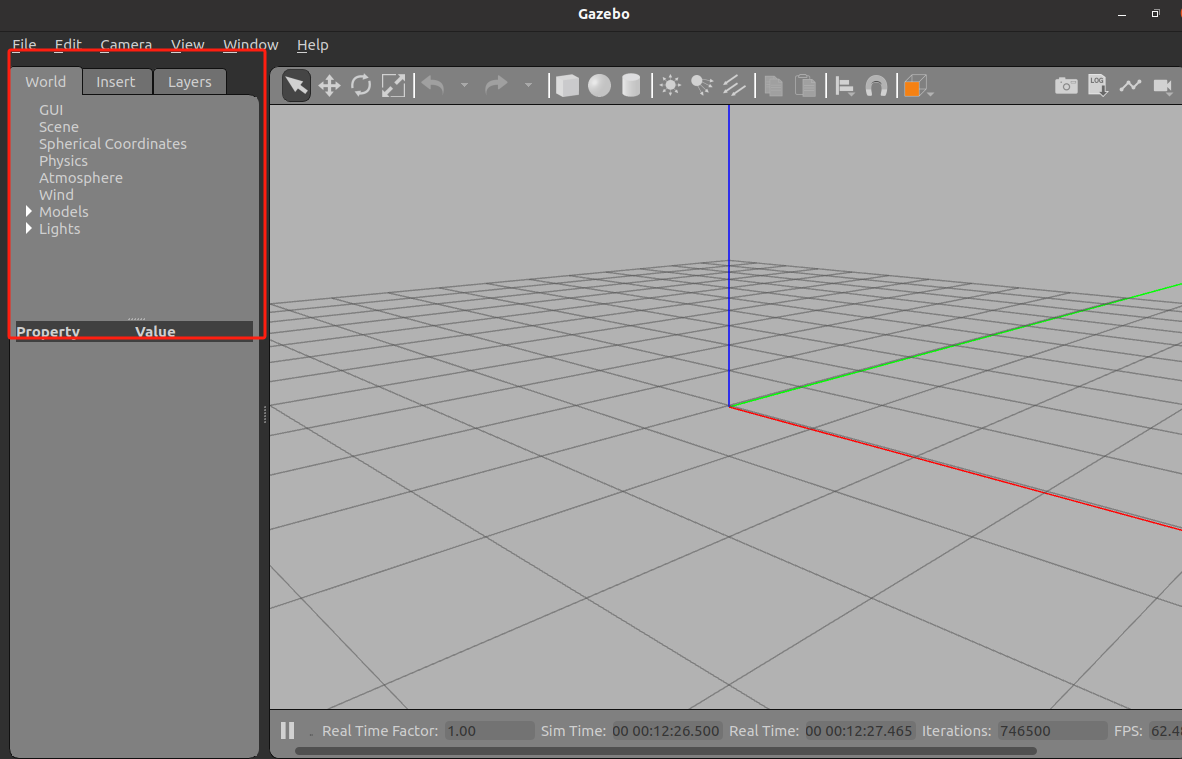
Left and right panels
Left panel
- world:Display the model currently in the scene, view and modify model parameters;
- Insert: Add a new object (model) to the simulation. To view a list of models click the arrow to expand the folder. Click (and release) on the model you want to insert, then click again in the scene to add;
- Layer:Organizes and displays the different visualization groups available in the simulation. Layer generally contains one or more models. Multiple models can display the model of this layer by turning it on or off.
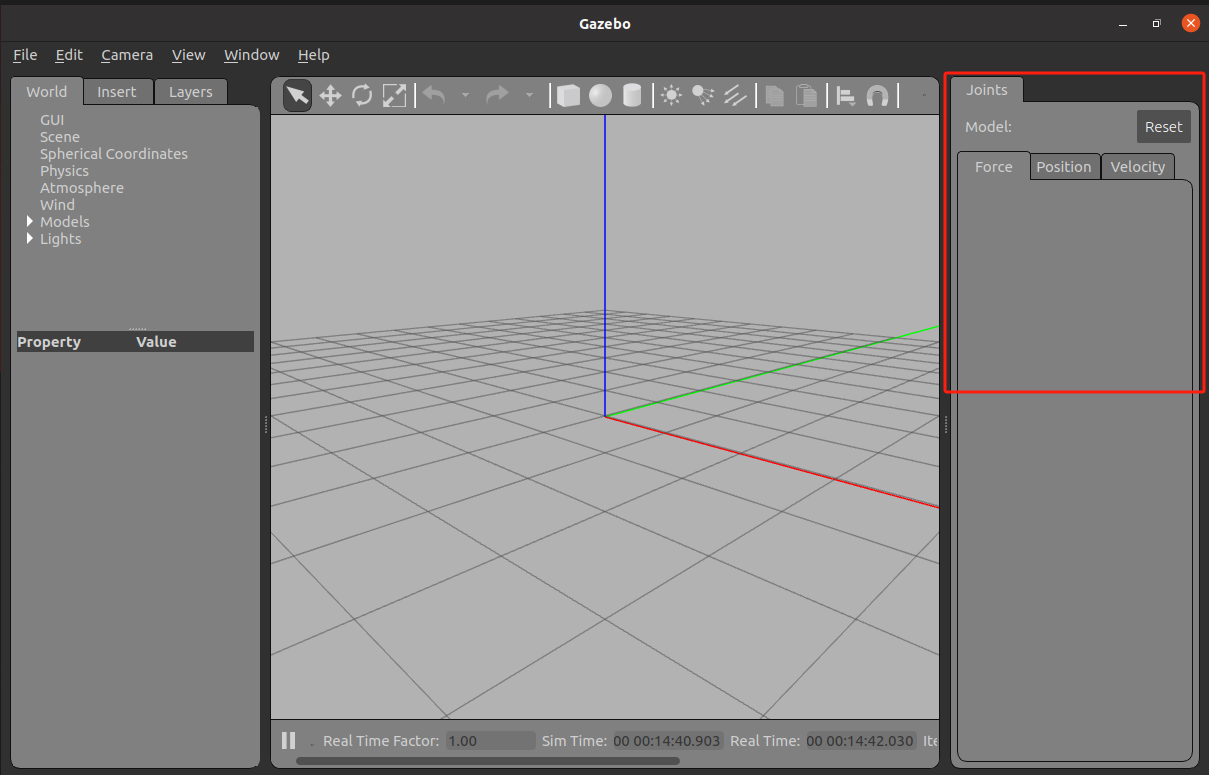
Right panel
By default, the right panel is hidden. Click and drag the bar to open it. The right panel can be used to interact with the moving parts (joints) of the selected model, including pose, velocity, etc. If no model is selected in the scene, the panel will display no information.
Top toolbar
Starting from the arrow on the left to the cube on the right, they are:
Select model: mark in the scene
Translate mode: select the model to be moved;
Rotate mode: select the model to be rotated;
Scale mode: select the model to be scaled;

Undo/Redo: Undo/redo operations in the scene;

Create simple shapes (cube, sphere, cylinder)
Lights: Add lights to the scene, including the positions illuminated by light sources in all directions

Copy/Paste: Copy/paste the model in the scene

Align, snap models: Align models to each other, snap one model to another

Change view: View the scene from different angles
21.2 Load urdf model in gazebo
To use urdf files with gazebo, you must add some tags specific for simulation to work properly with gazebo. For each robot model, each needs to add a
Here are two function packages:
- yahboomcar_description:stores urdf file of rosmaster-X3
- yahboomcar_gazebo:stores files related to the started gazebo
In addition, two function packages need to be installed. One is the function package for keyboard control nodes and terminal input.
xxxxxxxxxxsudo apt install ros-noetic-teleop-twist-keyboard -yThe other is the turtlebot3-gazebo function package, which contains a set gazebo environment and terminal input.
xxxxxxxxxxsudo apt install ros-noetic-turtlebot3-gazebo -yLet’s start the program first to see the effect, enter in the terminal,
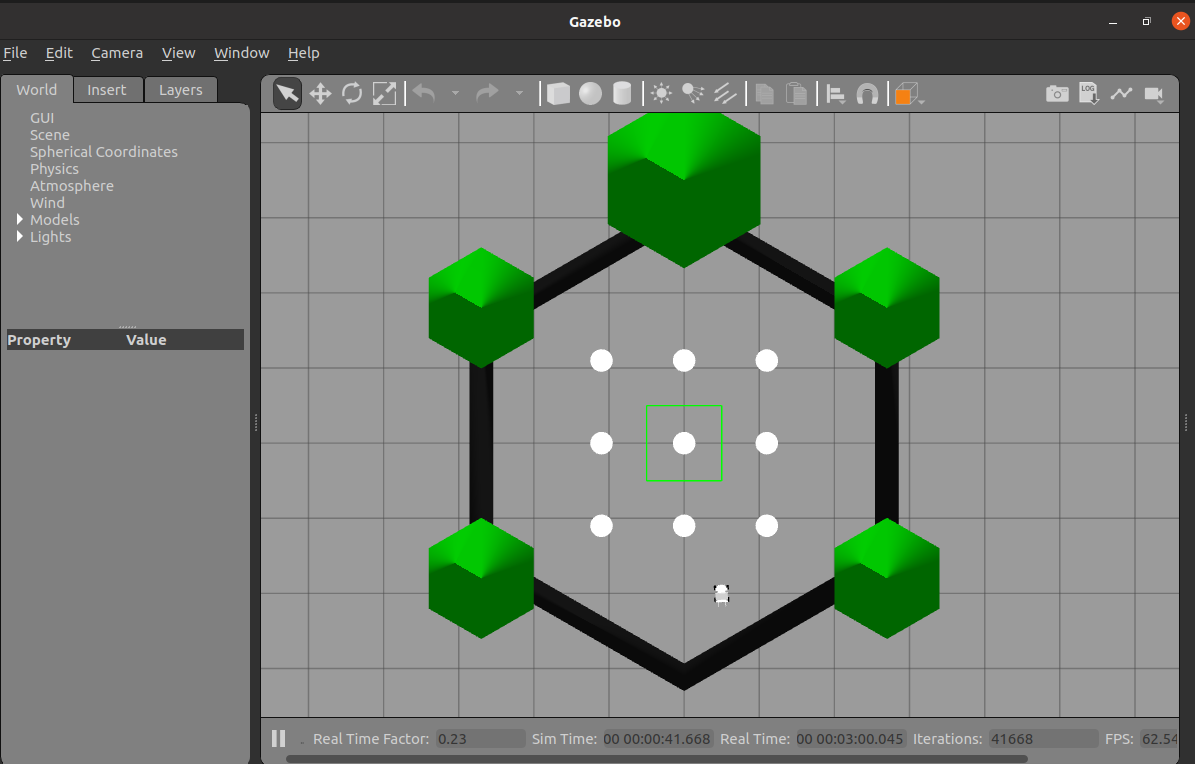
xxxxxxxxxxroslaunch yahboomcar_gazebo yahboom.launchAfter starting, the following screen appears,
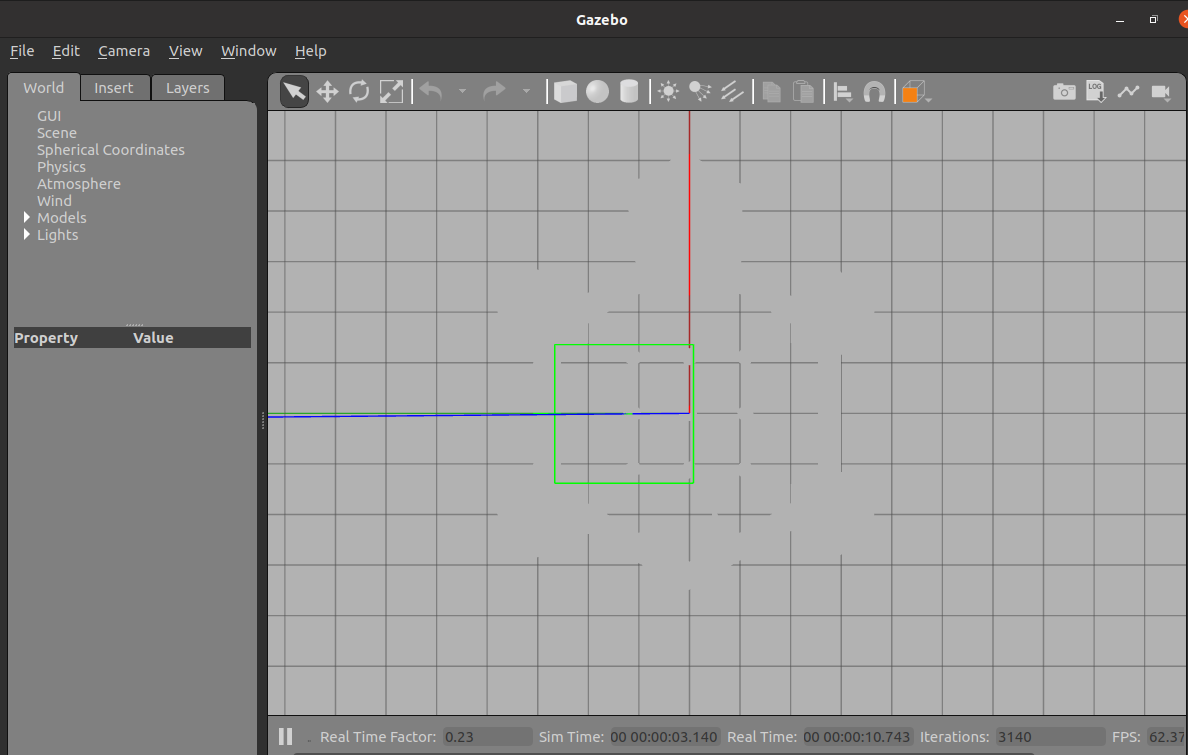
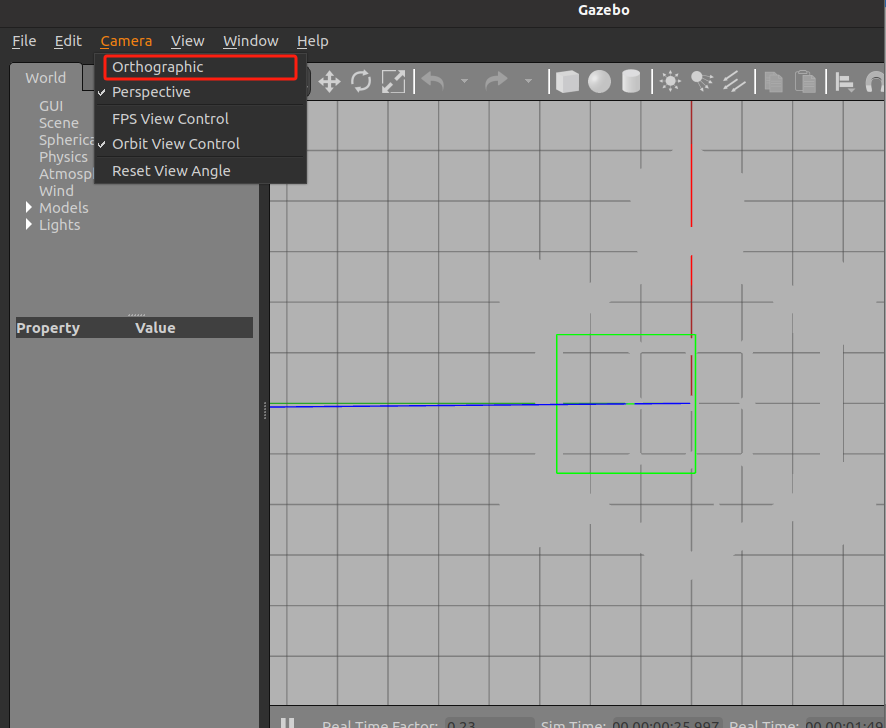
Click [Camera] above and select [Orthographic].
Then you can see the built environment, as shown below,
Then start the keyboard control node,
xxxxxxxxxxrosrun teleop_twist_keyboard teleop_twist_keyboard.py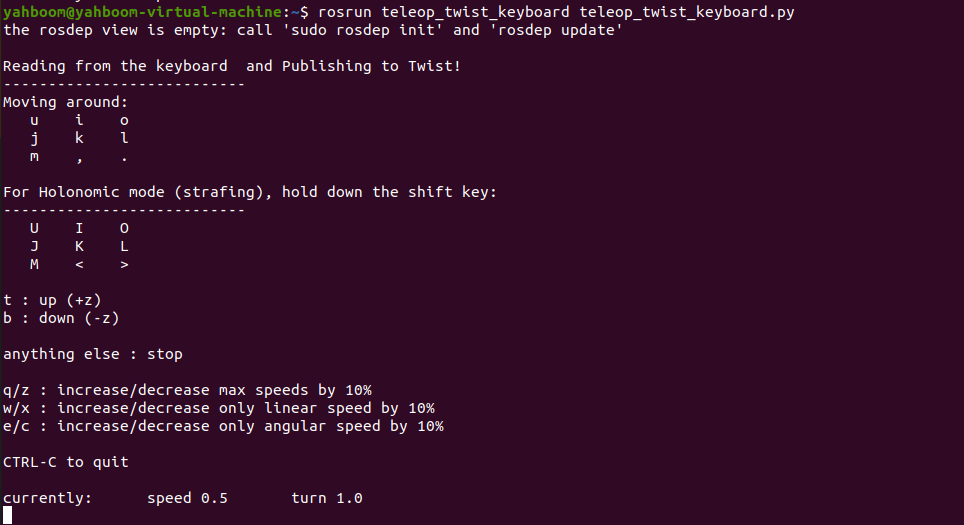
Press [i], [u], [o], [j], [l], [m], [,], [.] to control the movement of the car, and press the space bar to stop. Since the car is equipped with a camera and radar, we can also see the image data and radar data in rviz when it is started.
21.2.1 Launch file analysis
First look at the launched launch file,
x <launch> <arg name="ns" default="robot1"/> <arg name="format" default="xarco" doc="xacro ; urdf"/> <arg name="robot_type" value="X3" />
<arg name="gui" default="true" /> <arg name="run_camera" default="false"/>
<arg name="x_pos" default="-2.0"/> <arg name="y_pos" default="-0.5"/> <arg name="z_pos" default="0.0"/> <node name="tf_footprint_base" pkg="tf" type="static_transform_publisher" args="0 0 0 0 0 0 base_link base_footprint 40" />
<include file="$(find gazebo_ros)/launch/empty_world.launch"> <arg name="world_name" value="$(find turtlebot3_gazebo)/worlds/turtlebot3_world.world"/> <arg name="paused" value="false"/> <arg name="use_sim_time" value="true"/> <arg name="gui" value="true"/> <arg name="headless" value="false"/> <arg name="debug" value="false"/> </include>
<!-- urdf xml robot description loaded on the Parameter Server, converting the xacro into a proper urdf file--> <param name="robot_description" command="$(find xacro)/xacro --inorder $(find yahboomcar_description)/urdf/yahboomcar_X3.gazebo.urdf.xacro ns:=$(arg ns)" />
<node pkg="gazebo_ros" type="spawn_model" name="spawn_urdf" args="-urdf -model yahboomcar_$(arg robot_type) -x $(arg x_pos) -y $(arg y_pos) -z $(arg z_pos) -param robot_description" /> <!-- load the controllers --> <!--include file="$(find yahboomcar_gazebo)/launch/control.launch"></include--> <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" /> <node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" /> <node name="rviz" pkg="rviz" type="rviz" args="-d $(find yahboomcar_gazebo)/config/rviz/yahboomcar_X3.rviz"/> </launch>Mainly focus on the following points:
xxxxxxxxxx<include file="$(find gazebo_ros)/launch/empty_world.launch"> <arg name="world_name" value="$(find turtlebot3_gazebo)/worlds/turtlebot3_world.world"/> <arg name="paused" value="false"/> <arg name="use_sim_time" value="true"/> <arg name="gui" value="true"/> <arg name="headless" value="false"/> <arg name="debug" value="false"/> </include>Here is to start gazebo and then load the turtlebot3_world.world file, followed by some parameter settings, such as whether to use simulation time, etc. Generally, simulation time is used in gazebo, that is, use_sim_time is true.
xxxxxxxxxx <param name="robot_description" command="$(find xacro)/xacro --inorder $(find yahboomcar_description)/urdf/yahboomcar_X3.gazebo.urdf.xacro ns:=$(arg ns)" />Describe the urdf model that needs to be loaded. We will analyze the model here later.
xxxxxxxxxx<node pkg="gazebo_ros" type="spawn_model" name="spawn_urdf" args="-urdf -model yahboomcar_$(arg robot_type) -x $(arg x_pos) -y $(arg y_pos) -z $(arg z_pos) -param robot_description" />Load the robot model in gazebo, the parameter is robot_description.
21.2.2 Model file analysis
File directory::~/ros_ws/src/yahboomcar_description/urdf/yahboomcar_X3.gazebo.urdf.xacro
Most of the tags of the file were mentioned in the previous lesson, so I won’t go into details here. The main ones are the following parts.
xxxxxxxxxx <xacro:include filename="$(find yahboomcar_description)/urdf/yahboomcar_X3.gazebo.xacro"/>The yahboomcar_X3.gazebo.xacro file is loaded here. The directory of this file is,
xxxxxxxxxx~/ros_ws/src/yahboomcar_description/urdf
Take a look at the contents of this file. This involves adding the
xxxxxxxxxx <robot name="yahboomcar_X3" xmlns:xacro="http://ros.org/wiki/xacro"> <gazebo reference="back_left_wheel"> <mu1 value="2.0"/> <mu2 value="2.0"/> <kp value="10000000.0" /> <kd value="1.0" /> <fdir1 value="1 0 0"/> <material>Gazebo/Black</material> </gazebo>
<gazebo reference="back_right_wheel"> <mu1 value="2.0"/> <mu2 value="2.0"/> <kp value="10000000.0" /> <kd value="1.0" /> <fdir1 value="1 0 0"/> <material>Gazebo/Black</material> </gazebo> <gazebo reference="front_left_wheel"> <mu1 value="2.0"/> <mu2 value="2.0"/> <kp value="10000000.0" /> <kd value="1.0" /> <fdir1 value="0 0 1"/> <material>Gazebo/Black</material> </gazebo> <gazebo reference="front_right_wheel"> <mu1 value="2.0"/> <mu2 value="2.0"/> <kp value="10000000.0" /> <kd value="1.0" /> <fdir1 value="0 0 1"/> <material>Gazebo/Black</material> </gazebo>
<gazebo> <plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so"> <robotNamespace>/</robotNamespace> <!--robotParam>robot_description</robotParam--> <robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType> <legacyModeNS>true</legacyModeNS> </plugin> </gazebo> <gazebo> <plugin name="mecanum_controller" filename="libgazebo_ros_planar_move.so"> <robotNamespace>/</robotNamespace> <commandTopic>cmd_vel</commandTopic> <odometryTopic>odom</odometryTopic> <odometryFrame>odom</odometryFrame> <leftFrontJoint>front_left_joint</leftFrontJoint> <rightFrontJoint>front_right_joint</rightFrontJoint> <leftRearJoint>back_left_joint</leftRearJoint> <rightRearJoint>back_right_joint</rightRearJoint> <odometryRate>60.0</odometryRate> <robotBaseFrame>base_link</robotBaseFrame> </plugin> </gazebo>
<xacro:property name="camera_name" value = "camera"/><xacro:property name="frame_name" value = "camera_link"/><gazebo reference="camera_link"> <!--arg name="camera_name" default = "mycamera"/--> <sensor name="abzg_camera" type="depth"> <update_rate>30</update_rate> <camera> <horizontal_fov>1.047198</horizontal_fov> <image> <width>640</width> <height>480</height> <format>R8G8B8</format> </image> <clip> <near>0.05</near> <far>3</far> </clip> </camera> <plugin name="camera_link_controller" filename="libgazebo_ros_openni_kinect.so"> <baseline>0.2</baseline> <alwaysOn>true</alwaysOn> <updateRate>1.0</updateRate> <cameraName>${camera_name}_ir</cameraName> <imageTopicName>/${camera_name}/color/image_raw</imageTopicName> <cameraInfoTopicName>/${camera_name}/color/camera_info</cameraInfoTopicName> <depthImageTopicName>/${camera_name}/depth/image_raw</depthImageTopicName> <depthImageInfoTopicName>/${camera_name}/depth/camera_info</depthImageInfoTopicName> <pointCloudTopicName>/${camera_name}/depth/points</pointCloudTopicName> <frameName>${frame_name}</frameName> <pointCloudCutoff>0.5</pointCloudCutoff> <pointCloudCutoffMax>3.0</pointCloudCutoffMax> <distortionK1>0.00000001</distortionK1> <distortionK2>0.00000001</distortionK2> <distortionK3>0.00000001</distortionK3> <distortionT1>0.00000001</distortionT1> <distortionT2>0.00000001</distortionT2> <CxPrime>0</CxPrime> <Cx>0</Cx> <Cy>0</Cy> <focalLength>0</focalLength> <hackBaseline>0</hackBaseline> </plugin> </sensor></gazebo>
<gazebo reference="laser_link"> <sensor type="ray" name="head_hokuyo_sensor"> <pose>0 0 0 0 0 0</pose> <visualize>false</visualize> <update_rate>40</update_rate> <ray> <scan> <horizontal> <samples>720</samples> <resolution>1</resolution> <min_angle>-1.570796</min_angle> <max_angle>1.570796</max_angle> </horizontal> </scan> <range> <min>0.10</min> <max>30.0</max> <resolution>0.01</resolution> </range> <noise> <type>gaussian</type> <!-- Noise parameters based on published spec for Hokuyo laser achieving "+-30mm" accuracy at range < 10m. A mean of 0.0m and stddev of 0.01m will put 99.7% of samples within 0.03m of the true reading. --> <mean>0.0</mean> <stddev>0.01</stddev> </noise> </ray> <plugin name="gazebo_ros_head_hokuyo_controller" filename="libgazebo_ros_laser.so"> <topicName>/scan</topicName> <frameName>laser_link</frameName> </plugin> </sensor> </gazebo>
<gazebo reference="imu_link"> <material>Gazebo/Black</material> </gazebo>
<gazebo reference="imu_link"> <gravity>true</gravity> <sensor name="imu_sensor" type="imu"> <always_on>true</always_on> <update_rate>100</update_rate> <visualize>true</visualize> <topic>/imu/imu_data</topic> <plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin"> <topicName>/imu/imu_data</topicName> <bodyName>imu_link</bodyName> <updateRateHZ>100.0</updateRateHZ> <gaussianNoise>0.0</gaussianNoise> <xyzOffset>0 0 0</xyzOffset> <rpyOffset>0 0 0</rpyOffset> <frameName>imu_link</frameName> </plugin> <pose>0 0 0 0 0 0</pose> </sensor> </gazebo></robot>First look at the link of one of the wheels.
xxxxxxxxxx<gazebo reference="back_left_wheel"> <mu1 value="2.0"/> <mu2 value="2.0"/> <kp value="10000000.0" /> <kd value="1.0" /> <fdir1 value="1 0 0"/> <material>Gazebo/Black</material> </gazebo>A necessary tag here is
- mu1、mu1:friction coefficient
- kp、kd:stiffness coefficient, damping coefficient
- fdir1:direction corresponding to friction coefficient mu1
Let’s take a look at one of the plug-ins:
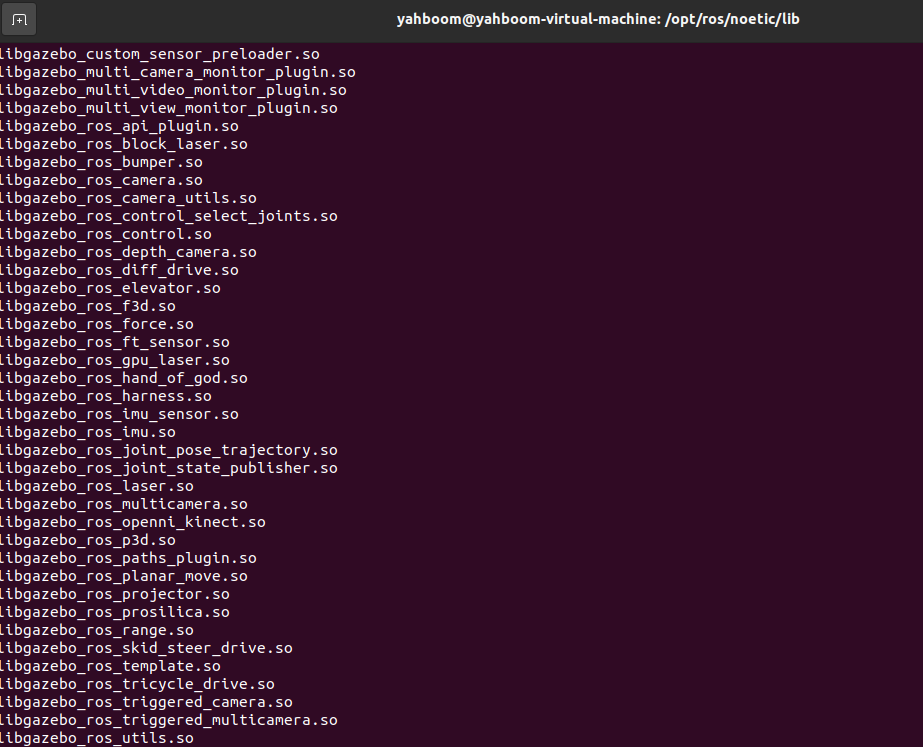
xxxxxxxxxx<gazebo> <plugin name="mecanum_controller" filename="libgazebo_ros_planar_move.so"> <robotNamespace>/</robotNamespace> <commandTopic>cmd_vel</commandTopic> <odometryTopic>odom</odometryTopic> <odometryFrame>odom</odometryFrame> <leftFrontJoint>front_left_joint</leftFrontJoint> <rightFrontJoint>front_right_joint</rightFrontJoint> <leftRearJoint>back_left_joint</leftRearJoint> <rightRearJoint>back_right_joint</rightRearJoint> <odometryRate>60.0</odometryRate> <robotBaseFrame>base_link</robotBaseFrame> </plugin></gazebo>Add a plug-in here. The name of the plug-in file is libgazebo_ros_planar_move.so, which is included with a pair of commandTopic, which is set to cmd_vel here. Plug-in files are saved in, /opt/ros/noetic/lib
For additional information about the plug-in, please refer to the following URL:
Let's take a look at some of the added sensors,
xxxxxxxxxx<gazebo reference="laser_link"> <sensor type="ray" name="head_hokuyo_sensor"> <pose>0 0 0 0 0 0</pose> <visualize>false</visualize> <update_rate>40</update_rate> <ray> <scan> <horizontal> <samples>720</samples> <resolution>1</resolution> <min_angle>-1.570796</min_angle> <max_angle>1.570796</max_angle> </horizontal> </scan> <range> <min>0.10</min> <max>30.0</max> <resolution>0.01</resolution> </range> <noise> <type>gaussian</type> <!-- Noise parameters based on published spec for Hokuyo laser achieving "+-30mm" accuracy at range < 10m. A mean of 0.0m and stddev of 0.01m will put 99.7% of samples within 0.03m of the true reading. --> <mean>0.0</mean> <stddev>0.01</stddev> </noise> </ray> <plugin name="gazebo_ros_head_hokuyo_controller" filename="libgazebo_ros_laser.so"> <topicName>/scan</topicName> <frameName>laser_link</frameName> </plugin> </sensor> </gazebo>This is a sensor that adds a radar, including the radar-related parameters set in the