How to use M2M2lidar
How to use M2M2lidar1、Overview3、RoboStudio test3.1、Install3.2、Open3.3、Connect3.4、Built-in mapping function4、Use of ROS feature pack4.1、Create a workspace4.2、Start node4.3、View related information
Lidar technology support Email :support@slamtec.com
Lidar wiki:http://wiki.ros.org/rplidar
Lidar SDK:https://github.com/Slamtec/rplidar_sdk
Lidar ROS:https://github.com/Slamtec/rplidar_ros
Lidar tutorials:https://github.com/robopeak/rplidar_ros/wiki
Lidar website:http://www.slamtec.com/cn/Support
RoboStudio website:https://www.slamtec.com/cn/RoboStudio
1、Overview
Slamtec Mapper, a brand-new lidar category that integrates map building and real-time positioning, includes Slamtec's third-generation high-performance SLAM engine and lidar. It does not require any external dependencies and is ready to use when powered on.
It is suitable for robot navigation and positioning, environmental surveying and mapping, handheld surveying and many other fields.
Slamtec Mapper does not need to provide any additional support, just a USB power supply line, power on and start working.
Built-in AP/Station dual-mode WiFi, and 100M Ethernet interface. The map and location data generated by Slamtec Mapper can be obtained in real time through the supporting mobile APP.
3、RoboStudio test
Test tool download link:https://www.slamtec.com/cn/RoboStudio
3.1、Install
Double-click robostudio icon to install, and continue to the next step until the installation is complete.
Place the SLAMTEC MAPPER radar on a flat surface, connect the power cord to the SLAMTEC MAPPER power interface, and use 5V power supply. When the radar starts normally, turn on the wireless network adapter of your computer, and you will see the hot spot SLAMWARE-XXXXXX ". Please connect the computer to "SLWAMWARE-XXXXXX" without a password.
3.2、Open
Open RoboStudio, if the system prompts that the server cannot be found, we can ignore this error.
3.3、Connect
Choose manual connect.
Connect SLAMWARE,input IP【192.168.11.1】port【1445】,click 【connect】.
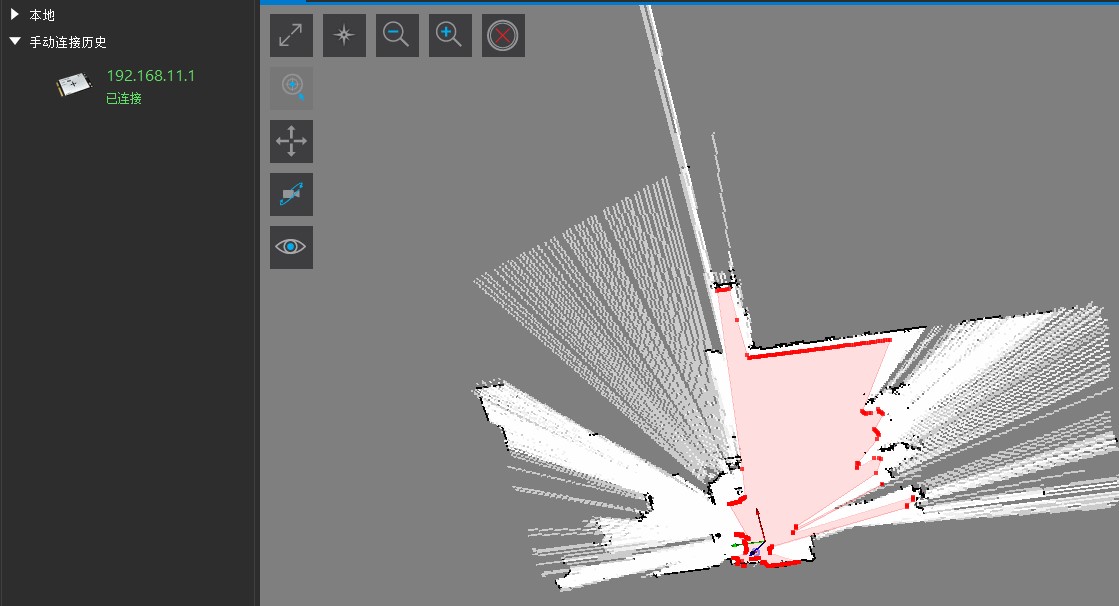
3.4、Built-in mapping function
4、Use of ROS feature pack
- Operating environment
Operating system: Ubuntu 18.04 LTS
ROS version: melodic
Device: PC
Hardware requirements: In order to use the ROS SDK, you need a Slamware-based mobile robot, open and configure a suitable IP address. After the slamware_ros_sdk_server_node node is started, it will try to connect to the robot.
- Directory Structure
| Contents | Explanation |
|---|---|
| src | Source code |
| --slamware_ros_sdk | ROS SDK package |
| --slamware_sdk | SDK related header files and library files |
| --slamware_ros_sample | Several routines based on slamware_ros_sdk |
4.1、Create a workspace
Extract【slamware_ws】file.
xxxxxxxxxxcd ~/slamware_ws # Enter the workspacecatkin_make # Compilesource devel/setup.bash # Configure the workspace system environment4.2、Start node
[Source devel/setup.bash] must be executed before starting the following command.
If the mobile robot is in AP mode, connect to the robot’s WIFI and start the node
xxxxxxxxxxroslaunch slamware_ros_sdk slamware_ros_sdk_server_node.launch ip_address:=192.168.11.1
View by rviz
xxxxxxxxxxroslaunch slamware_ros_sdk view_slamware_ros_sdk_server_node.launch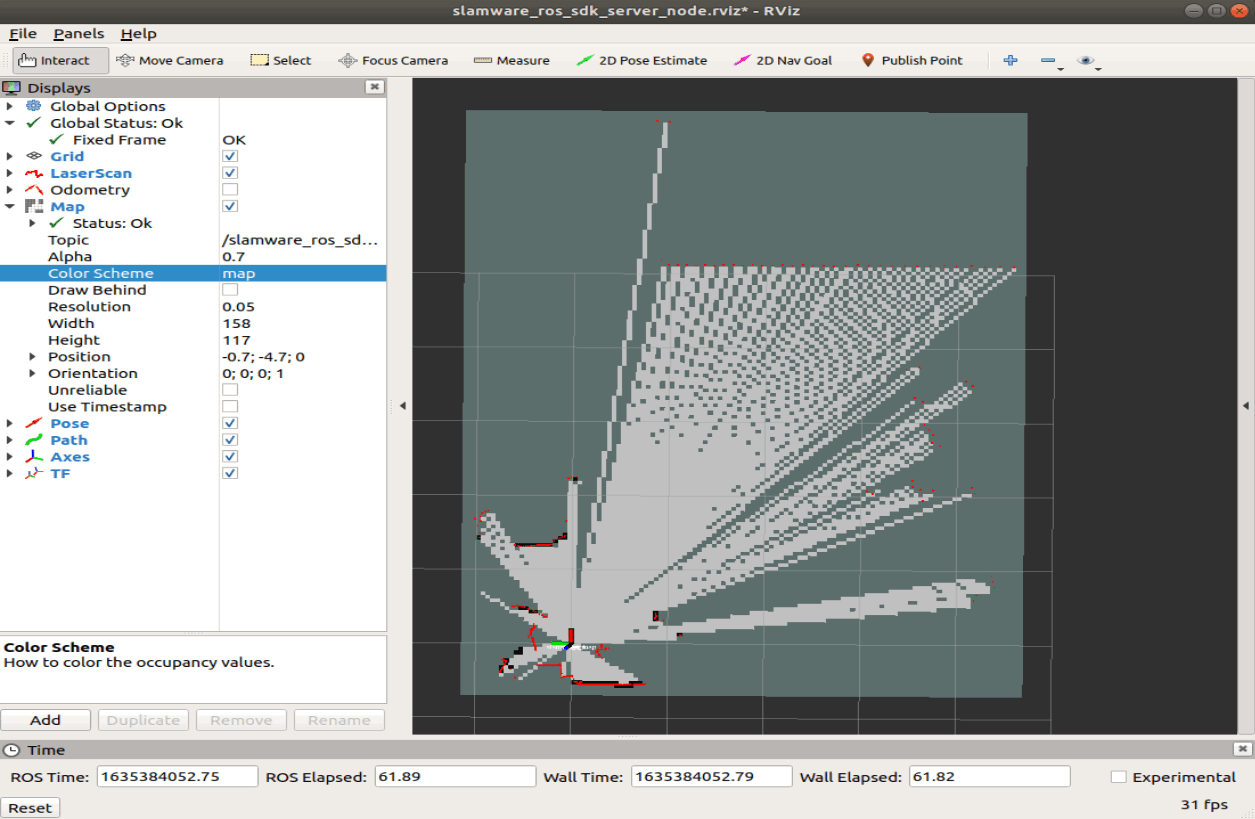
4.3、View related information
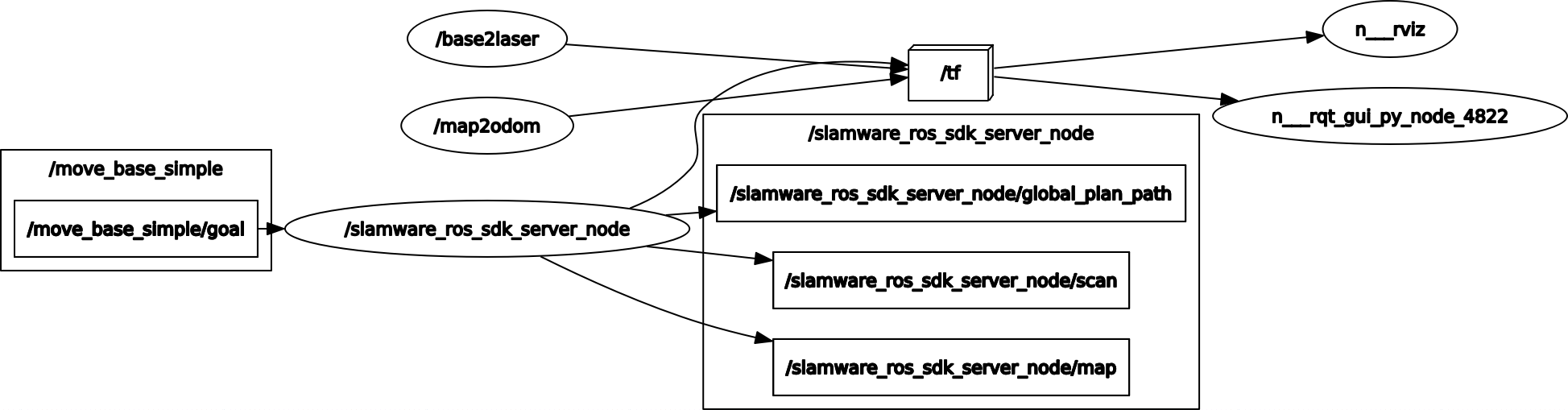
- View node
xxxxxxxxxxrosrun rqt_graph rqt_graph
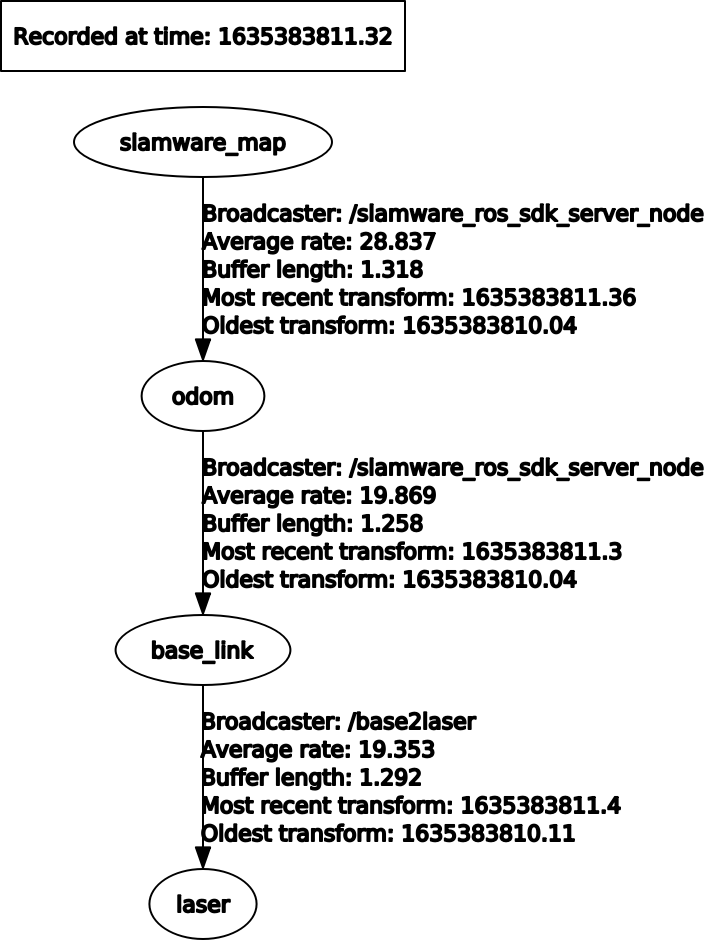
- View tf tree
xxxxxxxxxxrosrun rqt_tf_tree rqt_tf_tree