7.ROS2 topic communication publisher
1. Introduction to topic communication
Topic communication is the most frequently used communication method in ROS2. A publisher publishes data on a specified topic, and subscribers can receive the data as long as they subscribe to the data on the topic.
Topic communication is based on the publish/subscribe model, as shown in the figure:
The characteristics of topic data transmission are from one node to another node. The object sending data is called Publisher, and the object receiving data is called Subscriber. Each topic needs to have a name, the transmitted data also needs to have a fixed data type.
Next, we will explain how to use Python language to implement topic communication between nodes.
This case is located in the factory docker container. The source code location is:
/root/yahboomcar_ros2_ws/yahboomcar_ws/src/pkg_topic
2. Create a new function package
xxxxxxxxxxcd ~/yahboomcar_ros2_ws/yahboomcar_ws/srcros2 pkg create pkg_topic --build-type ament_python --dependencies rclpy --node-name publisher_demoAfter executing the above command, the pkg_topic function package will be created, and a publisher_demo node will be created, and the relevant configuration files have been configured.
3. Publisher implementation
Next edit [publisher_demo.py] to implement the publisher’s functions and add the following code:
xxxxxxxxxx#Import rclpy libraryimport rclpyfrom rclpy.node import Node#Import String messagefrom std_msgs.msg import String #Create a Topic_Pub node subclass that inherits from the Node base class and pass in a parameter nameclass Topic_Pub(Node): def __init__(self,name): super().__init__(name) #To create a publisher, use the create_publisher function. The parameters passed in are: #Topic data type, topic name, queue length to save messages self.pub = self.create_publisher(String,"/topic_demo",1) #Create a timer and enter the interrupt processing function at intervals of 1s. The parameters passed in are: #Interval time between interrupt function execution, interrupt processing function self.timer = self.create_timer(1,self.pub_msg) #Define interrupt handler function def pub_msg(self): msg = String() #Create a variable msg of type String msg.data = "Hi,I send a message." #Assign a value to the data in msg self.pub.publish(msg) #Publish topic data #Main functiondef main(): rclpy.init() #initialization pub_demo = Topic_Pub("publisher_node") #Create a Topic_Pub class object, and the parameter passed in is the name of the node. rclpy.spin(pub_demo) #Execute the rclpy.spin function and pass in a parameter. The parameter is the Topic_Pub class object just created. pub_demo.destroy_node() #Destroy node object rclpy.shutdown() #Turn off the ROS2 Python interface
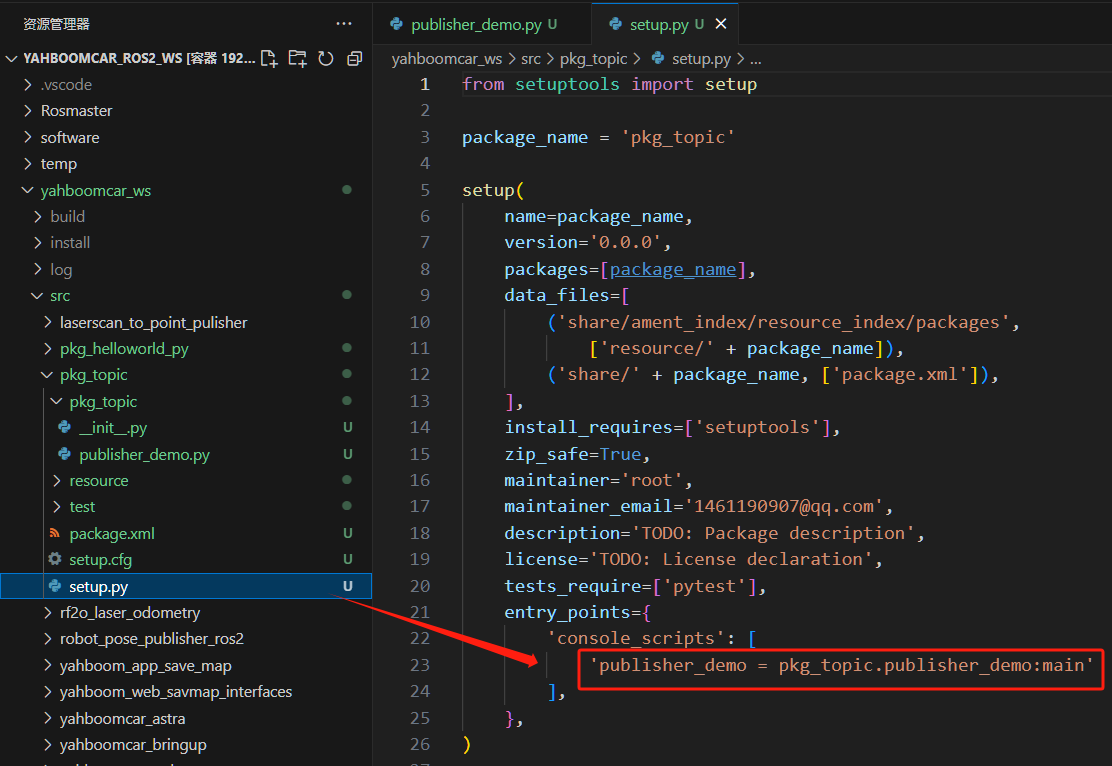
4. Edit configuration file
5. Compile workspace
xxxxxxxxxxcd ~/yahboomcar_ros2_ws/yahboomcar_wscolcon build --packages-select pkg_topicsource install/setup.bash
6.Run program
Open a terminal:
xxxxxxxxxxros2 run pkg_topic publisher_demo
After the program runs successfully, nothing is printed. We can view the data through the ros2 topic tool. First, check whether there is a topic published, and open another terminal to input:
xxxxxxxxxxros2 topic list
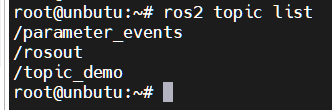
This topic_demo is the topic data defined in the program. Next, we use ros2 topic echo to print this data, and enter in the terminal:
xxxxxxxxxxros2 topic echo /topic_demo
It can be seen that the "Hi,I send a message." printed by the terminal is consistent with the msg.data = "Hi,I send a message." in our code.