10.RTAB 3D mapping and navigation
The following workspace contains the function packages in the entire rplidar_ws. If you need to transplant it to your own development board, you need to copy all the function packages to the src of the workspace for compilation, and install the relevant environment.
Note: This course uses Rosmaster-X3 as an example. It needs to be run with a depth camera. Rosmaster-X3 is run with an Astrapro depth camera.
Function package path: ~/rplidar_ws/src/yahboomcar_nav
10.1 Introduction
This software package is the ROS function package of RTAB Map, which is an RGB-D SLAM method based on a global loop closure detector with real-time constraints. The software package can be used to generate a three-dimensional point cloud of the environment and create a two-dimensional occupancy grid map for navigation.
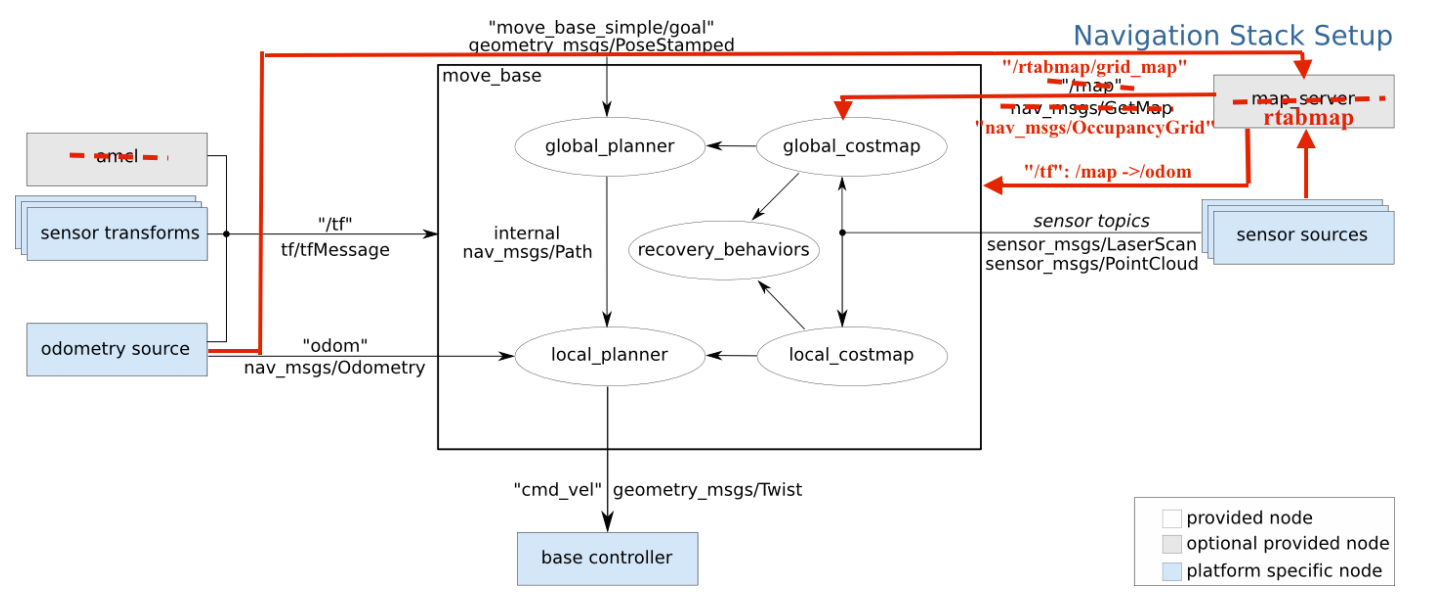
As can be seen from the above figure, Monte Carlo positioning amcl is not required. RTAB Map has its own positioning function; if used, it will cause repeated positioning and positioning failure. When using the RTAB Map navigation core framework, the initialized map is provided by RTAB Map, not map_server.
10.2 Mapping and Use
Input following command:
roslaunch yahboomcar_nav laser_astrapro_bringup.launchroslaunch yahboomcar_nav yahboomcar_rtabmap.launch use_rviz:=true
- use_rviz parameter: whether to open rviz.
Keyboard control car:
xxxxxxxxxxroslaunch yahboomcar_ctrl yahboom_keyboard.launch
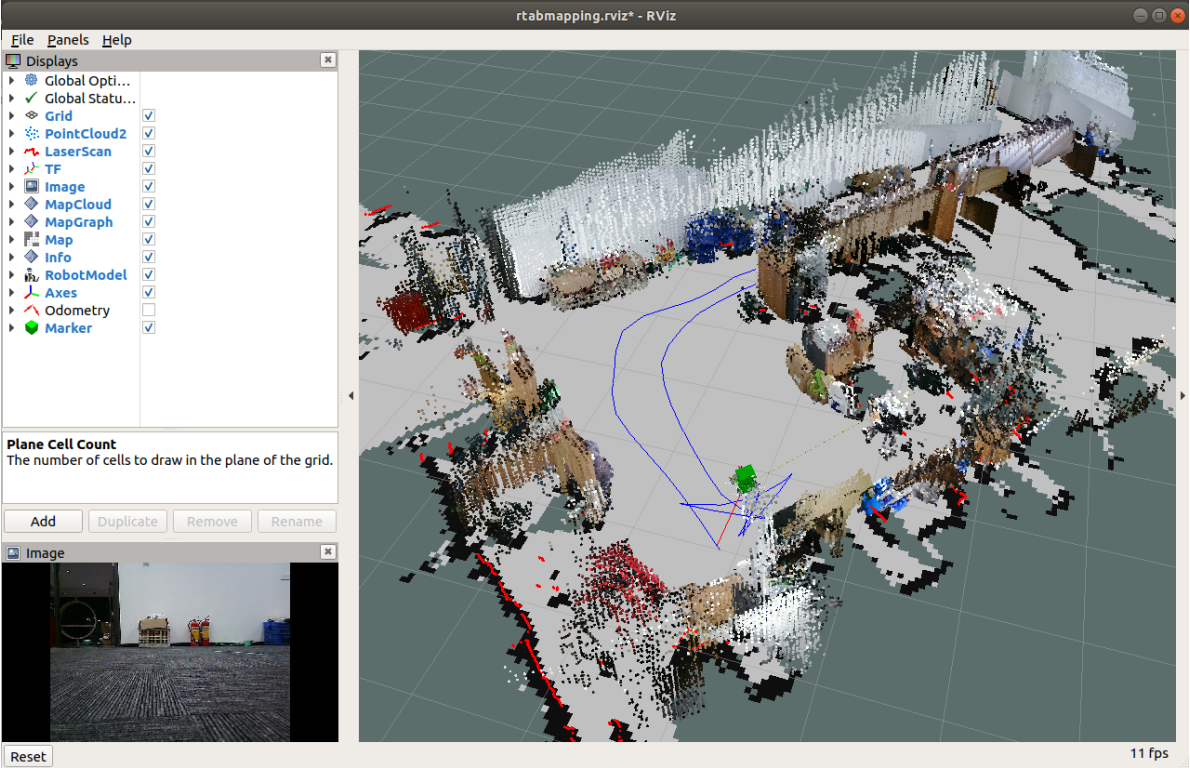
After starting according to the above method, choose any one method to control the mapping;
The slower the speed when constructing the map, the better the effect (especially the angular speed); the robot fills the area to be mapped and the map is as closed as possible.
When the map is completed, directly ctrl+c to exit the map node, the system will automatically save the map.
The default save path of the map is [~/.ros/rtabmap.db].
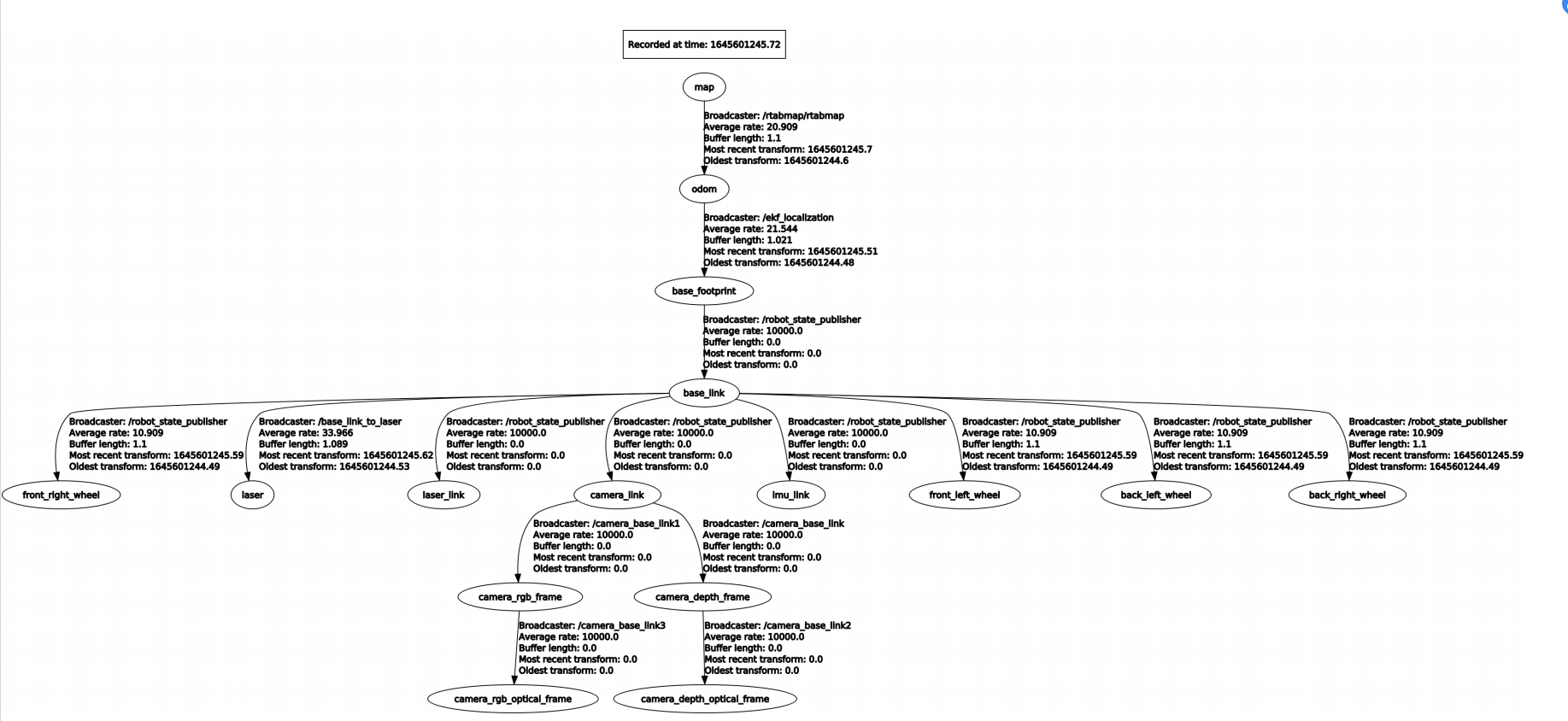
View tf tree:
xxxxxxxxxxrosrun rqt_tf_tree rqt_tf_tree
View node:
xxxxxxxxxxrqt_graph
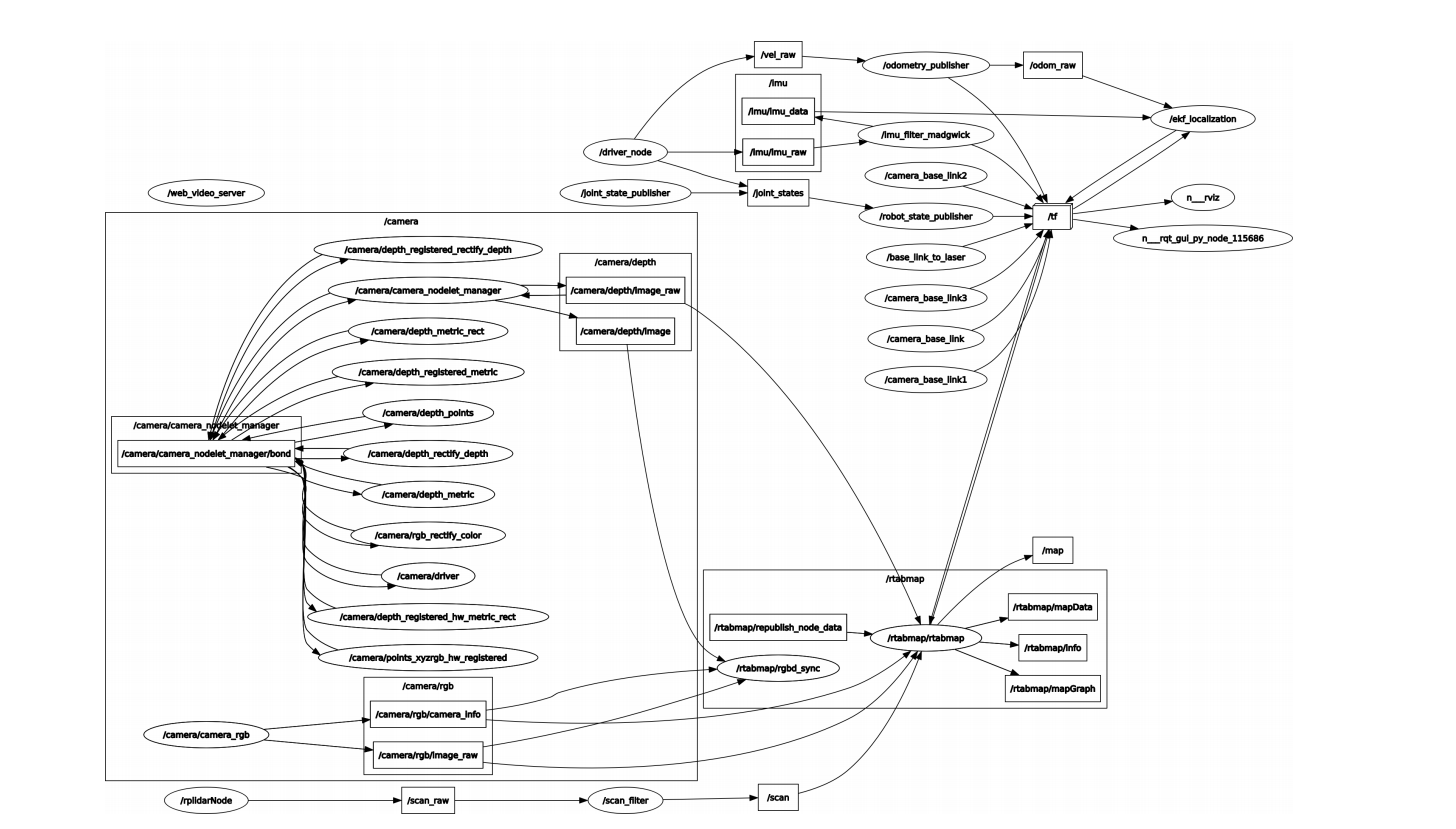
As can be seen from the above figure, the information that the [rtabmap] node needs to subscribe to: radar data, camera data, and tf data.
10.3 Navigation and obstacle avoidance
Input the following command to start the underlying driver:
xxxxxxxxxxroslaunch yahboomcar_nav laser_astrapro_bringup.launch
Input the following command to start mapping or navigation:
xxxxxxxxxxroslaunch yahboomcar_nav yahboomcar_rtabmap_nav.launch use_rviz:=False
- use_rviz parameter: whether to open rviz.
Keyboard control node:
xxxxxxxxxxroslaunch yahboomcar_ctrl yahboom_keyboard.launch
When the navigation mode is turned on, the system automatically loads the 2D raster map.
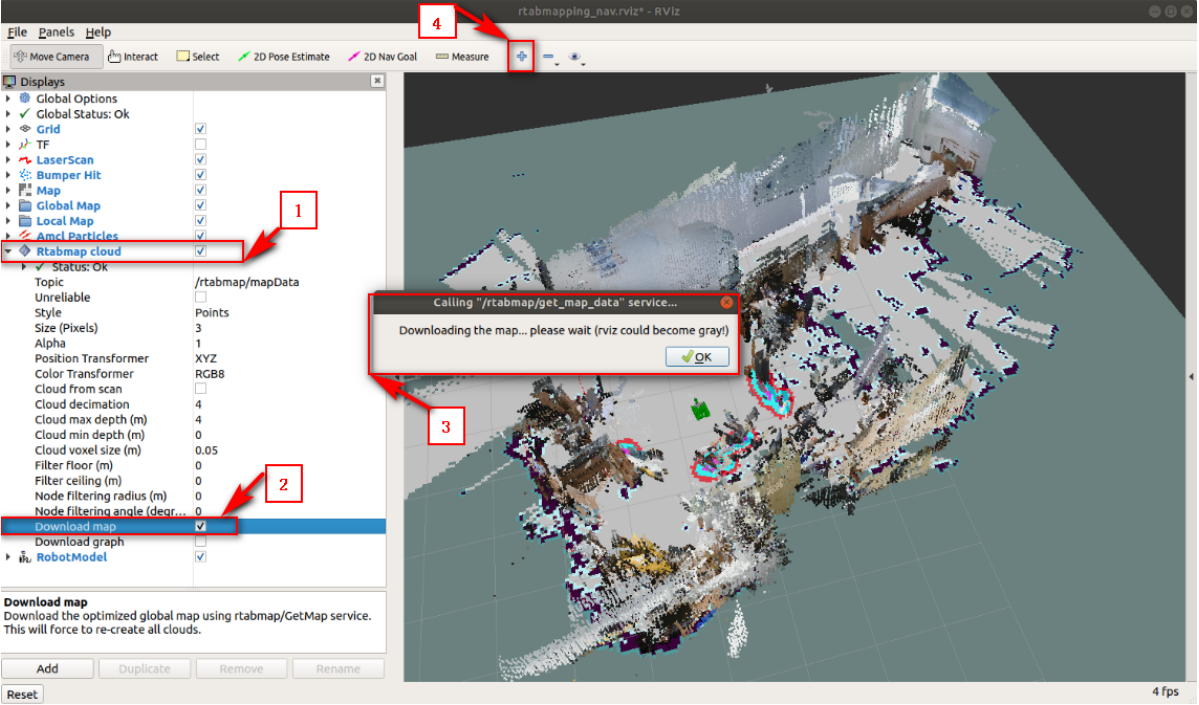
It cannot directly load the 3D map and needs to be loaded manually.
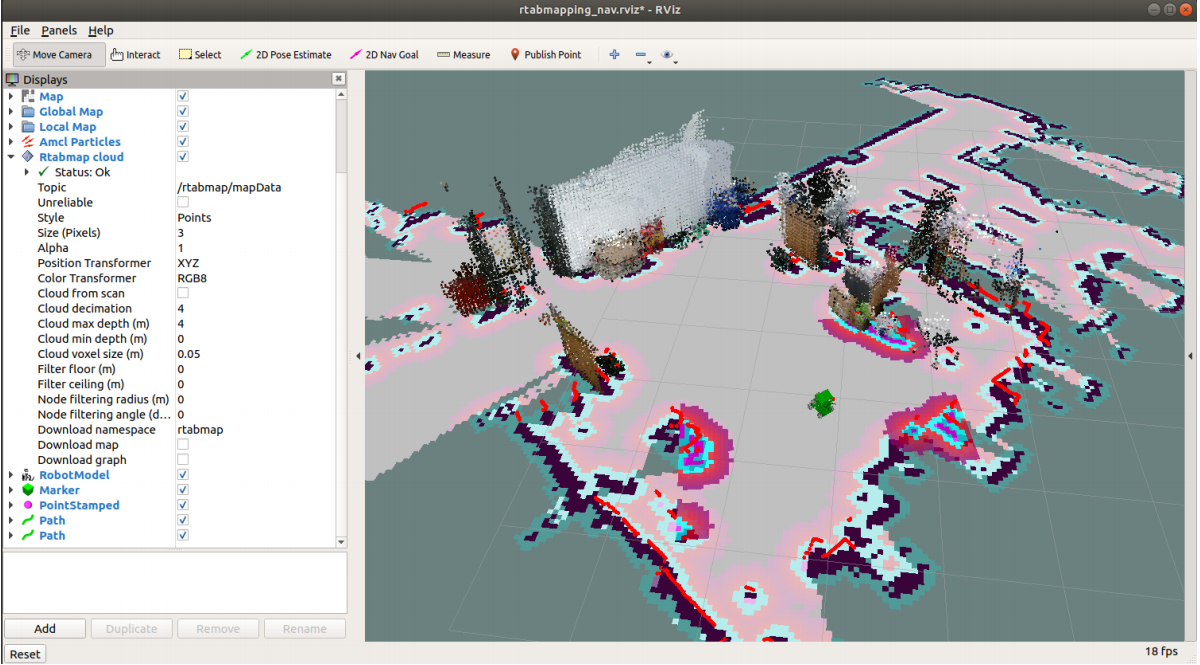
Load 3D map (1, 2, 3), 4 is to add the rviz debugging tool.
At this time, you can manually add [MarkerArray] to facilitate multi-point navigation and observation, and adjust [rviz] display parameters according to needs, such as the size of lidar points.
10.3.1 Single point navigation
- Use the [2D Pose Estimate] of the [rviz] tool to set the initial pose until the position of the car in the simulation is consistent with the actual position of the car.
- Click [2D Nav Goal] of the [rviz] tool, and then select a target point on the map where there are no obstacles. Release the mouse to start navigation. You can only select one target point and stop when you reach it.
10.3.2 Multi-point navigation
- Same as the first step of single-point navigation, first set the initial pose of the car.
- Click [Publish Point] of the [rviz] tool, and then select the target point on the map where there are no obstacles. Release the mouse to start navigation. You can click [Publish Point] again, and then select the point. The robot Will cruise between points.
- When using the [2D Pose Estimate] tool of the [rviz] tool to set the initial pose of the car, the multi-point navigation function is automatically canceled.
10.4 rtabmap node description
This is the master node for this package. It is a wrapper around the RTAB mapping core library. Here, when loop closure is detected, the map is incrementally built and optimized.
The node's online output is this map, which contains the latest data added to the map. The default location of the RTAB map database is [.ros/rtabmap.db], and the workspace is also set to [.ros].
10.4.1 Subscribed Topics
| Name | Type | Analyze |
|---|---|---|
| odom | nav_msgs/Odometry | Odometry stream. Required if parameters subscribe_depth or subscribe_stereo are true and odom_frame_id is not set. |
| rgb/image | sensor_msgs/Image | RGB/Mono image |
| rgb/camera_info | sensor_msgs/CameraInfo | RGB camera metadata. |
| depth/image | sensor_msgs/Image | Registered depth image. |
| scan | sensor_msgs/LaserScan | Laser scan stream. |
| scan_cloud | sensor_msgs/PointCloud2 | Laser scan point cloud stream. |
| left/image_rect | sensor_msgs/Image | Left RGB/Mono rectified image. |
| left/camera_info | sensor_msgs/CameraInfo | Left camera metadata |
| right/image_rect | sensor_msgs/Image | Right Mono rectified image. |
| right/camera_info | sensor_msgs/CameraInfo | Right camera metadata |
| goal | geometry_msgs/PoseStamped | Plan a path to reach this goal using the current online map. |
| rgbd_image | rtabmap_ros/RGBDImage | RGB-D synchronized image, only when subscribe_rgbd is true. |
10.4.2 Published Topics
| Name | Type | Analyze |
|---|---|---|
| info | rtabmap_ros/Info | RTAB-Map's info. |
| mapData | rtabmap_ros/MapData | RTAB-Map's graph and latest node data. |
| mapGraph | rtabmap_ros/MapGraph | RTAB-Map's graph only. |
| grid_map | nav_msgs/OccupancyGrid | Occupancy grid generated with laser scans |
| proj_map | nav_msgs/OccupancyGrid | DEPRECATED: use /grid_map topic instead with Grid/FromDepth=true. |
| cloud_map | sensor_msgs/PointCloud2 | 3D point cloud generated from the assembled local grids |
| cloud_obstacles | sensor_msgs/PointCloud2 | 3D point cloud of obstacles generated from the assembled local grids |
| cloud_ground | sensor_msgs/PointCloud2 | 3D point cloud of ground generated from the assembled local grids. |
| scan_map | sensor_msgs/PointCloud2 | 3D point cloud generated with the 2D scans or 3D scans |
| labels | visualization_msgs/MarkerArray | Convenient way to show graph's labels in RVIZ. |
| global_path | nav_msgs/Path | Poses of the planned global path. Published only once for each path planned. |
| local_path | nav_msgs/Path | Upcoming local poses corresponding to those of the global path. Published on every map update. |
| goal_reached | std_msgs/Bool | Status message if the goal is successfully reached or not. |
| goal_out | geometry_msgs/PoseStamped | Current metric goal sent from the rtabmap's topological planner. For example, this can be connected move_base_simple/goal to move_base。 |
| octomap_full | octomap_msgs/Octomap | Get an OctoMap. Available only if rtabmap_ros is built with octomap. |
| octomap_binary | octomap_msgs/Octomap | Get an OctoMap. Available only if rtabmap_ros is built with octomap. |
| octomap_occupied_space | sensor_msgs/PointCloud2 | A point cloud of the occupied space (obstacles and ground) of the OctoMap. Available only if rtabmap_ros is built with octomap. |
| octomap_obstacles | sensor_msgs/PointCloud2 | A point cloud of the obstacles of the OctoMap. Available only if rtabmap_ros is built with octomap. |
| octomap_ground | sensor_msgs/PointCloud2 | A point cloud of the ground of the OctoMap. Available only if rtabmap_ros is built with octomap. |
| octomap_empty_space | sensor_msgs/PointCloud2 | A point cloud of empty space of the OctoMap. Available only if rtabmap_ros is built with octomap. |
| octomap_grid | nav_msgs/OccupancyGrid | The projection of the OctoMap into a 2D occupancy grid map. Available only if rtabmap_ros is built with octomap. |
10.4.3 Services
| Name | Type | Analyze |
|---|---|---|
| get_map | rtabmap_ros/GetMap | Call this service to get the standard 2D occupancy grid |
| get_map_data | rtabmap_ros/GetMap | Call this service to get the map data |
| publish_map | rtabmap_ros/PublishMap | Call this service to publish the map data |
| list_labels | rtabmap_ros/ListLabels | Get current labels of the graph. |
| update_parameters | std_srvs/Empty | The node will update with current parameters of the rosparam server |
| reset | std_srvs/Empty | Delete the map |
| pause | std_srvs/Empty | Pause mapping |
| resume | std_srvs/Empty | Resume mapping |
| trigger_new_map | std_srvs/Empty | The node will begin a new map |
| backup | std_srvs/Empty | Backup the database to "database_path.back" (default ~/.ros/rtabmap.db.back) |
| set_mode_localization | std_srvs/Empty | Set localization mode |
| set_mode_mapping | std_srvs/Empty | Set mapping mode |
| set_label | rtabmap_ros/SetLabel | Set a label to latest node or a specified node. |
| set_goal | rtabmap_ros/SetGoal | Set a topological goal (a node id or a node label in the graph). |
| octomap_full | octomap_msgs/GetOctomap | Get an OctoMap. Available only if rtabmap_ros is built with octomap. |
| octomap_binary | octomap_msgs/GetOctomap | Get an OctoMap. Available only if rtabmap_ros is built with octomap. |
7.4.4 Parameters
| Name | Type | Default value | Analyze |
|---|---|---|---|
| subscribe_depth | bool | true | Subscribe to depth image |
| subscribe_scan | bool | false | Subscribe to laser scan |
| subscribe_scan_cloud | bool | false | Subscribe to laser scan point cloud |
| subscribe_stereo | bool | false | Subscribe to stereo images |
| subscribe_rgbd | bool | false | Subsribe to rgbd_image topic |
| frame_id | string | base_link | The frame attached to the mobile base. |
| map_frame_id | string | map | The frame attached to the map. |
| odom_frame_id | string | ‘ ’ | The frame attached to odometry. |
| odom_tf_linear_variance | double | 0.001 | When odom_frame_id is used, the first 3 values of the diagonal of the 6x6 covariance matrix are set to this value. |
| odom_tf_angular_variance | double | 0.001 | When odom_frame_id is used, the last 3 values of the diagonal of the 6x6 covariance matrix are set to this value. |
| queue_size | int | 10 | Size of message queue for each synchronized topic. |
| publish_tf | bool | true | Publish TF from /map to /odom. |
| tf_delay | double | 0.05 | |
| tf_prefix | string | ‘ ’ | Prefix to add to generated tf. |
| wait_for_transform | bool | true | Wait (maximum wait_for_transform_duration sec) for transform when a tf transform is not still available. |
| wait_for_transform_duration | double | 0.1 | Wait duration for wait_for_transform. |
| config_path | string | ‘ ’ | Path of a config files containing RTAB-Map's parameters. Parameters set in the launch file overwrite those in the config file. |
| database_path | string | .ros/rtabmap.db | Path of the RTAB-Map's database. |
| gen_scan | bool | false | Generate laser scans from depth images (using the middle horizontal line of the depth image). Not generated if subscribe_scan or subscribe_scan_cloud are true. |
| gen_scan_max_depth | double | 4.0 | Maximum depth of the laser scans generated. |
| approx_sync | bool | false | Use approximate time synchronization of input messages. If false, note that the odometry input must have also exactly the same timestamps than the input images. |
| rgbd_cameras | int | 1 | Number of RGB-D cameras to use (when subscribe_rgbd is true). Well for now, a maximum of 4 cameras can be synchronized at the same time. |
| use_action_for_goal | bool | false | Use actionlib to send the metric goals to move_base. |
| odom_sensor_sync | bool | false | Adjust image and scan poses relatively to odometry pose for each node added to graph. |
| gen_depth | bool | false | Generate depth image from scan_cloud projection into RGB camera, taking into account displacement of the RGB camera accordingly to odometry and lidar frames. |
| gen_depth_decimation | int | 1 | Scale down image size of the camera info received (creating smaller depth image). |
| gen_depth_fill_holes_size | int | 0 | Fill holes of empty pixels up to this size. Values are interpolated from neighbor depth values. 0 means disabled. |
| gen_depth_fill_iterations | double | 0.1 | Maximum depth error (m) to interpolate. |
| gen_depth_fill_holes_error | int | 1 | Number of iterations to fill holes. |
| map_filter_radius | double | 0.0 | Filter nodes before creating the maps. Only load data for one node in the filter radius (the latest data is used) up to filter angle (map_filter_angle). |
| map_filter_angle | double | 30.0 | Angle used when filtering nodes before creating the maps. See also map_filter_radius. Used for all published maps. |
| map_cleanup | bool | true | If there is no subscription to any map cloud_map, grid_map or proj_map, clear the corresponding data. |
| latch | bool | true | If true, the last message published on the map topics will be saved and sent to new subscribers when they connect. |
| map_always_update | bool | true | Always update the occupancy grid map even if the graph has not been updated |
| map_empty_ray_tracing | bool | true | Do ray tracing to fill unknown space for invalid 2D scan's rays (assuming invalid rays to be infinite). Used only when map_always_update is also true. |
7.4.5 TF transform
Preparation:
- base_link → sensor
- odom → base_link
Provide:
map → odom