7 RTAB-Map 3D mapping navigation
7 RTAB-Map 3D mapping navigation 7.1 Introduction 7.2 Mapping use 7.2.1 Start 7.2.2 Mapping 7.3 Navigation and obstacle avoidance 7.3.1 Single point navigation 7.3.2 Multi-point navigation 7.3.3 Parameter configuration 7.4 node rtabmap 7.4.1 Subscription topic 7.4.2 Post topic 7.4.3 Services 7.4.4 Parameters 7.4.5 tf conversion 7.5 node rtabmapviz 7.5.1. Subscription topic 7.5.2 parameter configuration 7.5.3 the required tf conversion
wiki: http://wiki.ros.org/rtabmap_ros
7.1 Introduction
This package is a ROS functional package for RTAB Map, an RGB-D SLAM method based on a global loop closure detector with real-time constraints. This package can be used to generate 3D point clouds of the environment and create 2D occupancy grid maps for navigation.
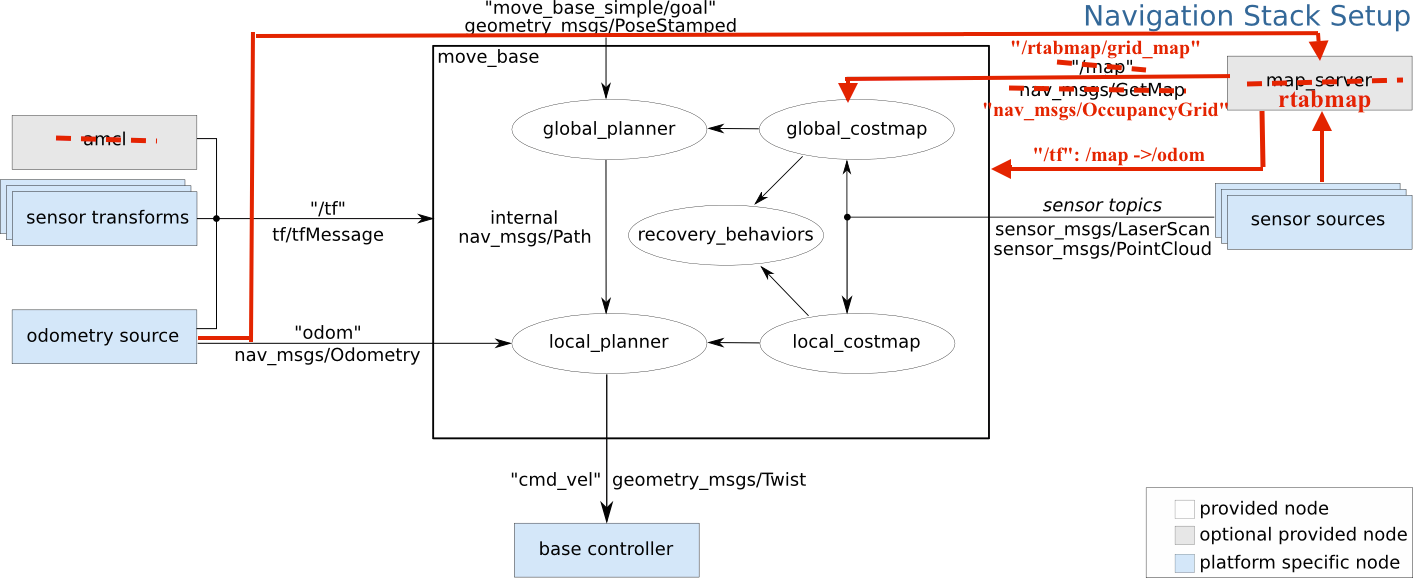
As can be seen from the above figure, there is no need for Monte Carlo positioning amcl, and RTAB Map has its own positioning function; if it is used, it will cause repeated positioning and positioning failure. When using RTAB Map to navigate the core framework, the initialized map is provided by RTAB Map, not map_server.
7.2 Mapping use
Note: When building a map, the slower the speed, the better the effect(note that if the rotation speed is slower), the effect will be poor if the speed is too fast.
According to different models, you only need to set the purchased model in [.bashrc], X1(ordinary four-wheel drive) X3(Mike wheel) X3plus(Mike wheel mechanical arm) R2(Ackerman differential) and so on. Section takes X3 as an example
Open the [.bashrc] file
sudo vim .bashrc
Find the [ROBOT_TYPE] parameter and modify the corresponding model
xxxxxxxxxxexport ROBOT_TYPE=X3 # ROBOT_TYPE: X1 X3 X3plus R2 X7
7.2.1 Start
Start the underlying driver command(robot side)
xxxxxxxxxxroslaunch yahboomcar_nav laser_astrapro_bringup.launch
Command to start mapping or navigation(robot side)
xxxxxxxxxxroslaunch yahboomcar_nav yahboomcar_rtabmap.launch use_rviz:=False
- use_rviz parameter: whether to open rviz.
Start Visualization(Virtual Machine)
xxxxxxxxxxroslaunch yahboomcar_nav view_rtabmap.launch
Keyboard control node(virtual machine)
xrosrun teleop_twist_keyboard teleop_twist_keyboard.py # system integrationroslaunch yahboomcar_ctrl yahboom_keyboard.launch # yahboomcar custom
7.2.2 Mapping
After starting up according to the above method, choose any method to control the map(handle control is recommended); the slower the speed when building the map, the better the effect(especially the angular speed); the robot fills the area to be built, and the map is closed as much as possible.
- handle control
- keyboard control

When the map is completed, directly [ctrl+c] to exit the map node, the system will automatically save the map. The default map save path [~/.ros/rtabmap.db].
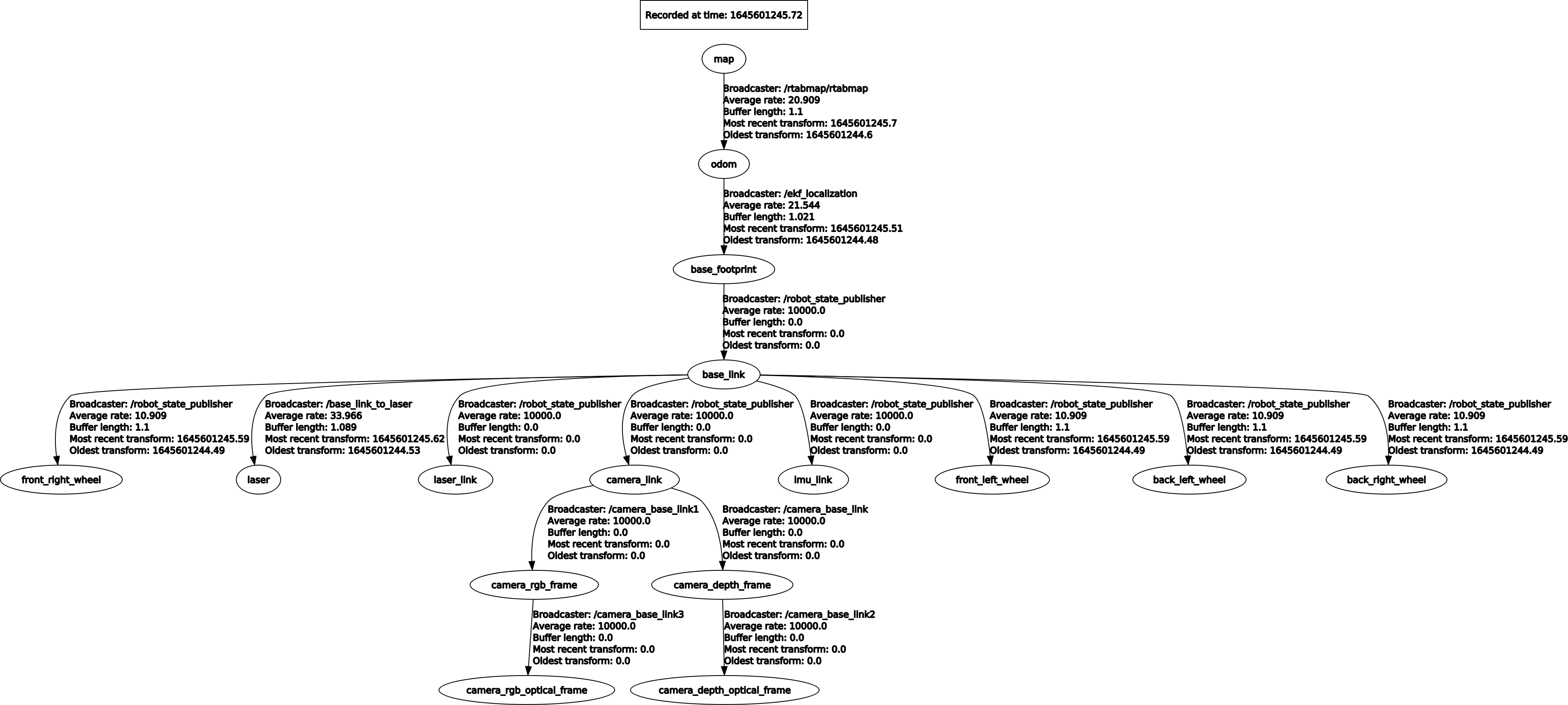
View tf tree
xxxxxxxxxxrosrun rqt_tf_tree rqt_tf_tree
Node view
xxxxxxxxxxrqt_graph
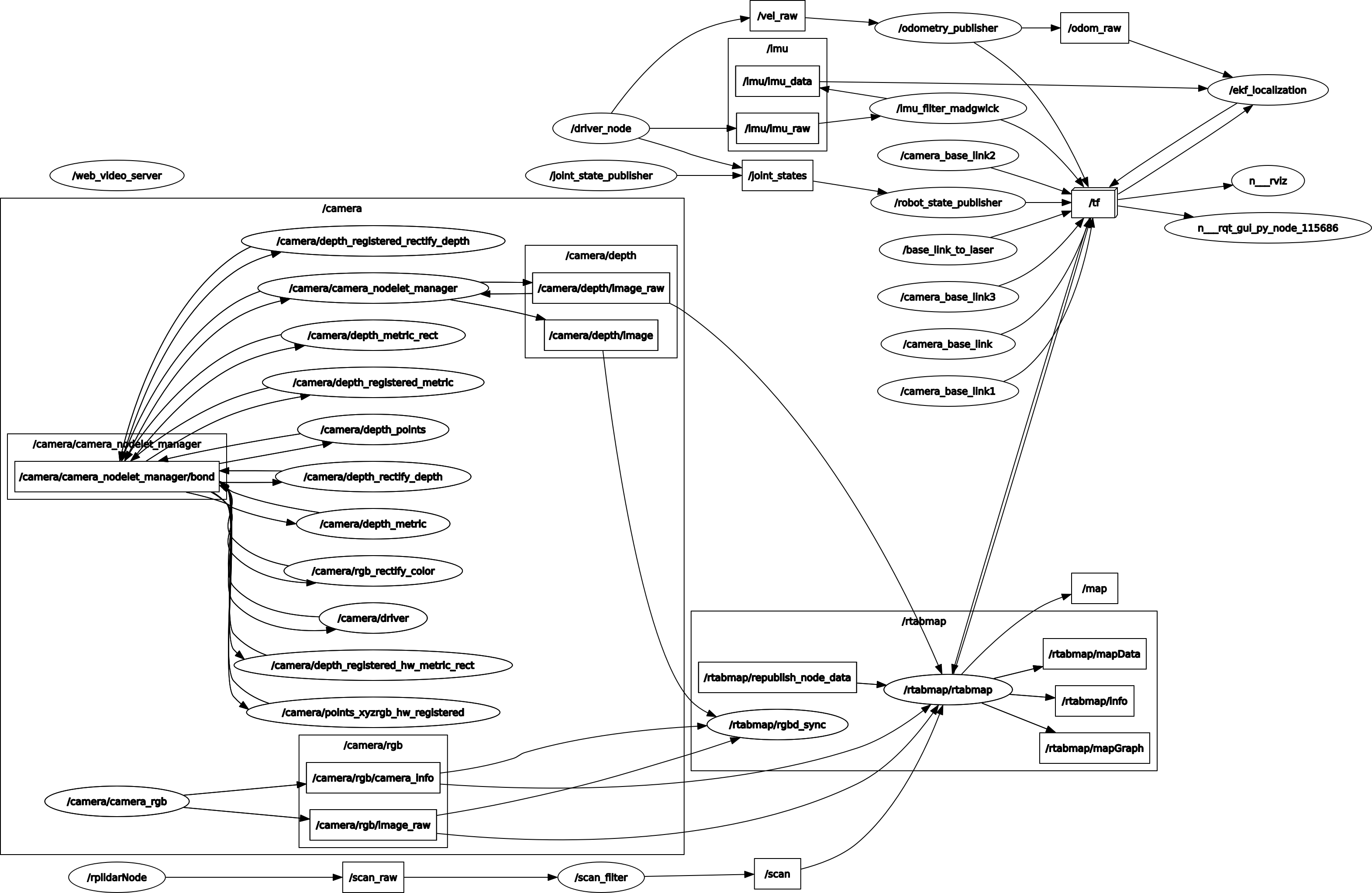
As can be seen from the above figure, the information that the [rtabmap] node needs to subscribe: radar data, camera data, tf data.
7.3 Navigation and obstacle avoidance
Note: [R2] of the remote control handle has the function of canceling the target point.
Start the underlying driver command(robot side)
xroslaunch yahboomcar_nav laser_astrapro_bringup.launch
Command to start mapping or navigation(robot side)
xxxxxxxxxxroslaunch yahboomcar_nav yahboomcar_rtabmap_nav.launch use_rviz:=False
- use_rviz parameter: whether to open rviz.
Start Visualization(Virtual Machine)
xxxxxxxxxxroslaunch yahboomcar_nav view_rtabmap_nav.launch
Keyboard control node(virtual machine)
xrosrun teleop_twist_keyboard teleop_twist_keyboard.py # system integrationroslaunch yahboomcar_ctrl yahboom_keyboard.launch # yahboomcar custom
When the navigation mode is turned on, the system automatically loads the 2D grid map, and cannot directly load the 3D map, it needs to be loaded manually.
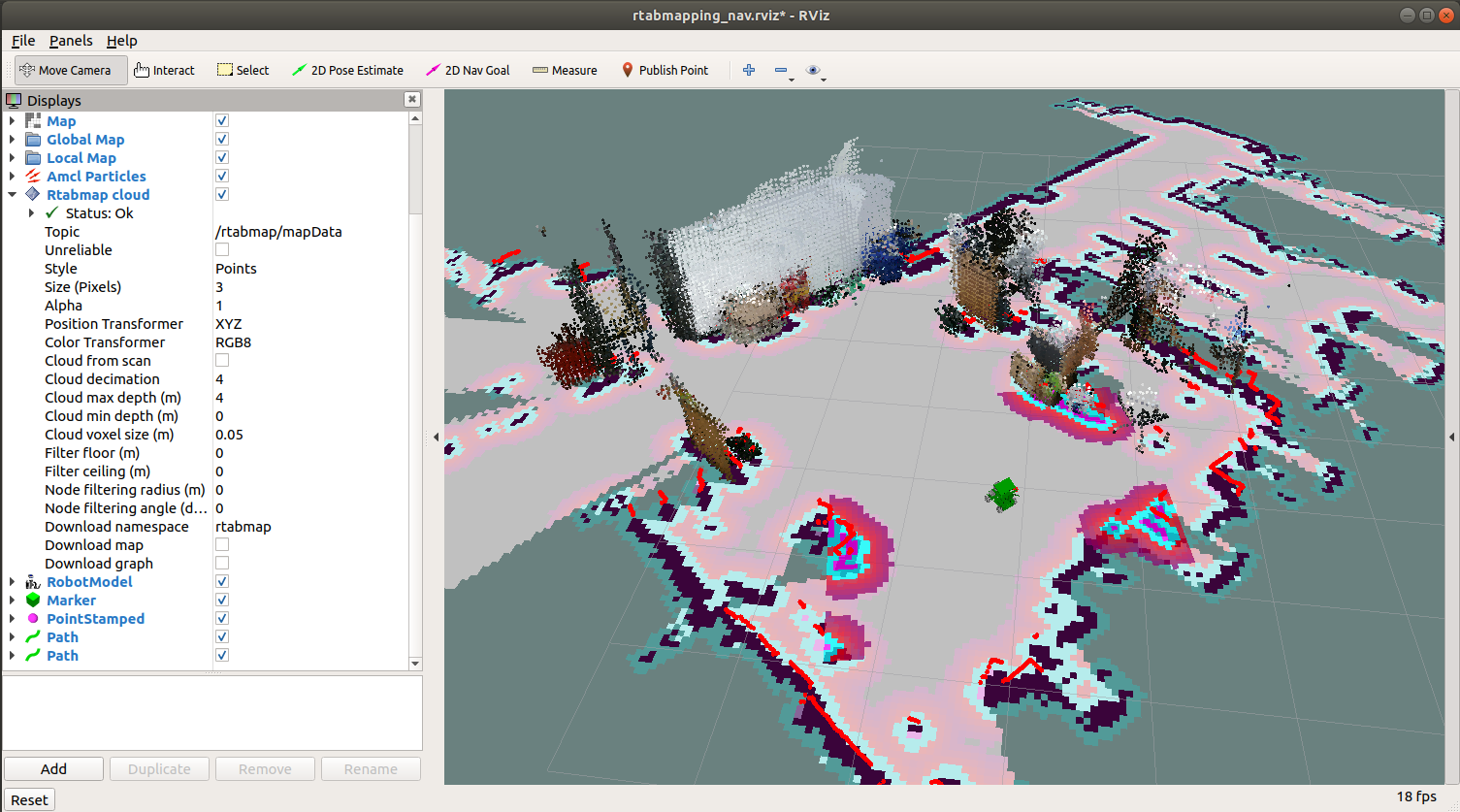
Load the 3D map(1, 2, 3), 4 is to add the rviz debugging tool.
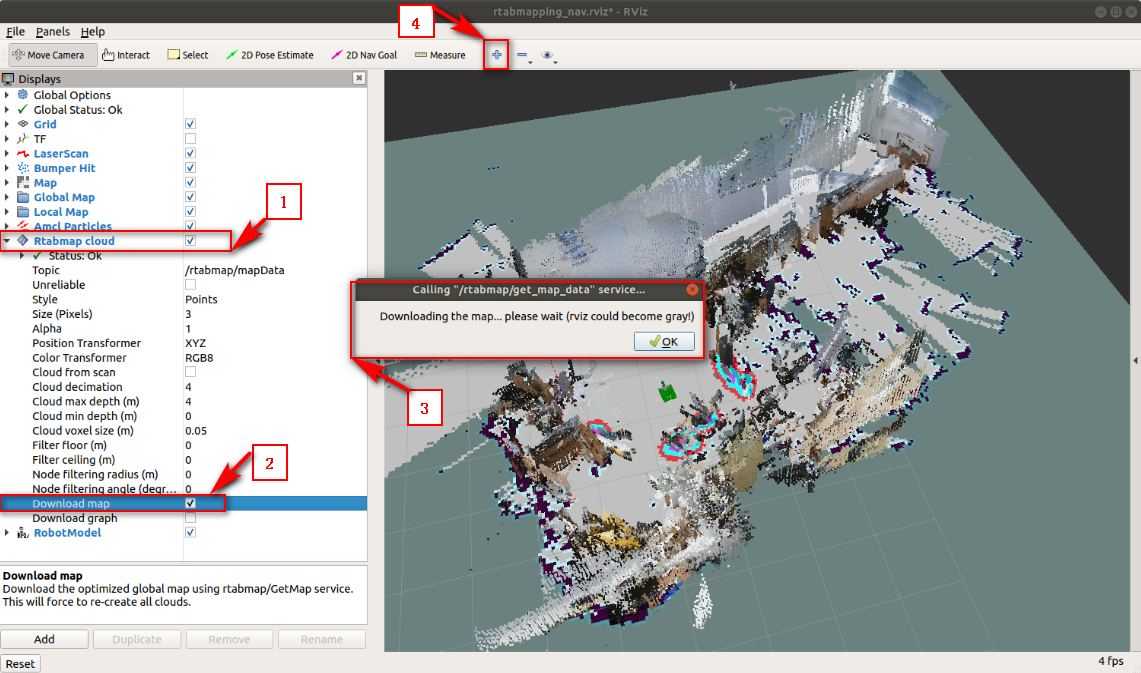
At this point, you can manually add [MarkerArray] to facilitate multi-point navigation and observation, and adjust [rviz] display parameters as needed, such as the size of lidar points.
7.3.1 Single point navigation
- Use the [2D Pose Estimate] of the [rviz] tool to set the initial pose until the position of the car in the simulation is consistent with the position of the actual car.
- Click the [2D Nav Goal] of the [rviz] tool, and then select the target point on the map where there are no obstacles, release the mouse to start the navigation, only one target point can be selected, and it will stop when it arrives.
7.3.2 Multi-point navigation
- Same as the first step of single-point navigation, first set the initial pose of the car.
- Click the [Publish Point] of the [rviz] tool, and then select the target point on the map where there are no obstacles, release the mouse to start the navigation, you can click the [Publish Point] again, and then select the point, the robot will point and point cruising in between.
- When using the [2D Pose Estimate] tool of the [rviz] tool to set the initial pose of the car, the multi-point navigation function is automatically canceled.
7.3.3 Parameter configuration
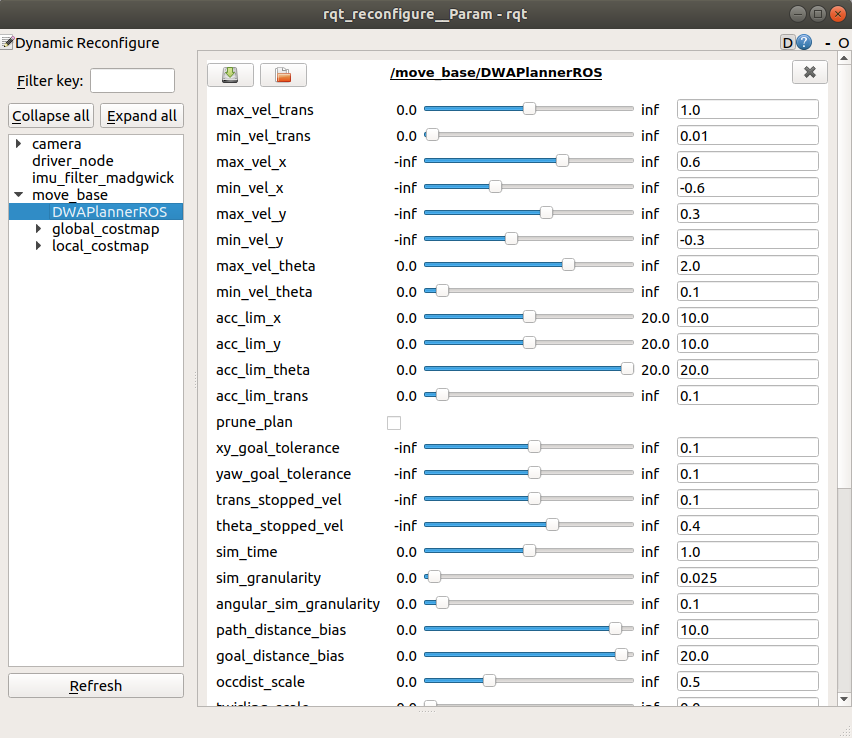
After starting the navigation function, open the dynamic parameter adjustment tool, adjust it according to your own needs, and observe the motion state of the robot until the effect is optimal, record the current parameters, and modify them to the corresponding dwa_local_planner_params.yaml file under the yahboomcar_nav function package.
xxxxxxxxxxrosrun rqt_reconfigure rqt_reconfigure
Looking at the yahboomcar_navigation.launch file, you can see that the navigation parameters are modified in the move_base.launch file under the yahboomcar_rtabmap_nav function package.
xxxxxxxxxx< launch > <!-- Whether to open rviz || Whether to open rviz --> < arg name = "use_rviz" default = "false" /> <!-- MarkerArray node--> < node name = 'send_mark' pkg = "yahboomcar_nav" type = "send_mark.py" /> <!-- Mobile APP Node--> < include file = "$(find yahboomcar_nav)/launch/library/app.launch" /> <!-- Navigation core component move_base --> < include file = "$(find yahboomcar_nav)/launch/library/move_base.launch" /> <!-- rtabmap navigation --> < include file = "$(find yahboomcar_nav)/launch/library/rtabmap_nav.launch" /> <!-- RVIZ --> < include file = "$(find yahboomcar_nav)/launch/view/view_rtabmap_nav.launch" if = "$(arg use_rviz)" /> </ launch > Find the move_base.launch file, open the sample file as follows, you can modify and replace it according to your needs; at this time, the [DWA planner] is selected, and the [DWA] file is loaded.
xxxxxxxxxx< launch > < arg name = "robot_type" value = "$(env ROBOT_TYPE)" doc = "robot_type [X1,X3,X3plus,R2,X7]" /> <!-- Arguments --> < arg name = "move_forward_only" default = "false" /> <!-- move_base --> < node pkg = "move_base" type = "move_base" respawn = "false" name = "move_base" output = "screen" > < rosparam file = "$(find yahboomcar_nav)/param/common/global_costmap_params.yaml" command = "load" /> < rosparam file = "$(find yahboomcar_nav)/param/common/local_costmap_params.yaml" command = "load" /> < rosparam file = "$(find yahboomcar_nav)/param/common/move_base_params.yaml" command = "load" /> < rosparam file = "$(find yahboomcar_nav)/param/common/costmap_common_params_$(arg robot_type).yaml" command = "load" ns = "global_costmap" /> < rosparam file = "$(find yahboomcar_nav)/param/common/costmap_common_params_$(arg robot_type).yaml" command = "load" ns = "local_costmap" /> < rosparam file = "$(find yahboomcar_nav)/param/common/dwa_local_planner_params_$(arg robot_type).yaml" command = "load" /> < param name = "base_local_planner" type = "string" value = "dwa_local_planner/DWAPlannerROS" if = "$(eval arg('robot_type') == 'X3')" /> <!-- <param name="base_local_planner" type="string" value="teb_local_planner/TebLocalPlannerROS"/>--> < param name = "DWAPlannerROS/min_vel_x" value = "0.0" if = "$(arg move_forward_only)" /> < remap from = "cmd_vel" to = "cmd_vel" /> < remap from = "odom" to = "odom" /> </ node > </ launch > Note: When using the DWA planner, the difference between the omnidirectional car and the differential car is whether the speed in the Y direction is 0. There are clear comments in it, which can be modified according to the actual situation.
Enter the dwa_local_planner_params.yaml file under the yahboomcar_nav function package, some parameters are as follows:
xxxxxxxxxxDWAPlannerROS : # Robot Configuration Parameters # The absolute value of the maximum linear velocity in the x direction, unit: m/s # The maximum y velocity for the robot in m/s max_vel_x : 0.6 # The absolute value of the minimum linear velocity in the x direction, a negative number means that it can be moved back, unit: m/s # The minimum x velocity for the robot in m/s, negative for backwards motion. min_vel_x : - 0.6 # The absolute value of the maximum linear velocity in the y direction, unit: m/s. Differential robot is 0 # The maximum y velocity for the robot in m/s max_vel_y : 0.3 # The absolute value of the minimum linear velocity in the y direction, unit: m/s. Differential robot is 0 # The minimum y velocity for the robot in m/s min_vel_y : - 0.3 … # The limit acceleration of the robot in the x direction, the unit is meters/sec^2 # The x acceleration limit of the robot in meters/sec^2 acc_lim_x : 10.0 # The limit acceleration of the robot in the y direction, it is 0 for the differential robot # The y acceleration limit of the robot in meters/sec^2 acc_lim_y : 10.0 ... .. Other parameter files can be opened, combined with annotations and courseware, and modified according to their own needs.
7.4 node rtabmap
This is the master node for this package. It is a wrapper around the RTAB mapping core library. Here, the map is incrementally built and optimized when loop closures are detected. The online output of the node is the local map, which contains the most recent data added to the map. The default location of the RTAB map database is [.ros/rtabmap.db], and the workspace is also set to [.ros].
7.4.1 Subscription topic
| name | type | Parse |
|---|---|---|
| odom | nav_msgs/Odometry | Odometer. Required if parameter subscribe_depth or subscribe_stereo is true; and odom_frame_id is not set. |
| rgb/image | sensor_msgs/Image | RGB/monocular image. |
| rgb/camera_info | sensor_msgs/CameraInfo | RGB camera parameters. |
| depth/image | sensor_msgs/Image | depth image. |
| scan | sensor_msgs/LaserScan | Single line laser. |
| scan_cloud | sensor_msgs/PointCloud2 | Laser scan point cloud stream. |
| left/image_rect | sensor_msgs/Image | Left eye corrected image. |
| left/camera_info | sensor_msgs/CameraInfo | Left eye camera parameters. |
| right/image_rect | sensor_msgs/Image | Right eye corrected image. |
| right/camera_info | sensor_msgs/CameraInfo | Right eye camera parameters. |
| goal | geometry_msgs/PoseStamped | Plan a path to this goal using the current online map. |
| rgbd_image | rtabmap_ros/RGBDImage | RGB-D sync image, only if subscribe_rgbd is true. |
7.4.2 Post topic
| name | type | Parse |
|---|---|---|
| info | rtabmap_ros/Info | rtabmap information. |
| mapData | rtabmap_ros/MapData | Graph and latest node data for rtabmap. |
| mapGraph | rtabmap_ros/MapGraph | rtabmap graphics |
| grid_map | nav_msgs/OccupancyGrid | Maps generated by laser scanning occupy the grid. |
| proj_map | nav_msgs/OccupancyGrid | Deprecated, use /grid_map instead of Grid/FromDepth=true |
| cloud_map | sensor_msgs/PointCloud2 | A 3D point cloud generated from a local grid. |
| cloud_obstacles | sensor_msgs/PointCloud2 | Generate a 3D point cloud of obstacles from a local mesh. |
| cloud_ground | sensor_msgs/PointCloud2 | A 3D ground point cloud generated from a local grid. |
| scan_map | sensor_msgs/PointCloud2 | 2D scans or 3D point clouds generated from 3D scans. |
| labels | visualization_msgs/MarkerArray | Convenience method for displaying graph labels in RVIZ. |
| global_path | nav_msgs/Path | The planned pose of the planned global path. Published only once per planned path. |
| local_path | nav_msgs/Path | Plan future local poses corresponding to the global path. Posted every time the map is updated. |
| goal_reached | std_msgs/Bool | A plan status message whether the goal was successfully achieved. |
| goal_out | geometry_msgs/PoseStamped | Plan the current metric target sent from rtabmap's topology planner. For example, you can connect to move_base via move_base_simple/goal. |
| octomap_full | octomap_msgs/Octomap | Get octomap. Available only when rtabmap_ros is built with octomap. |
| octomap_binary | octomap_msgs/Octomap | Get octomap. Available only when rtabmap_ros is built with octomap. |
| octomap_occupied_space | sensor_msgs/PointCloud2 | octomap The point cloud of the occupied space(obstacles and ground). Available only when rtabmap_ros is built with octomap. |
| octomap_obstacles | sensor_msgs/PointCloud2 | A point cloud of obstacles on the octomap. Available only when rtabmap_ros is built with octomap. |
| octomap_ground | sensor_msgs/PointCloud2 | octomap's point cloud. Available only when rtabmap_ros is built with octomap. |
| octomap_empty_space | sensor_msgs/PointCloud2 | Blank point cloud for octomap. Available only when rtabmap_ros is built with octomap. |
| octomap_grid | nav_msgs/OccupancyGrid | Project the octomap into a 2D occupancy raster map. Available only when rtabmap_ros is built with octomap. |
7.4.3 Services
| name | type | Parse |
|---|---|---|
| get_map | rtabmap_ros/GetMap | Call this service to get a standard 2D occupancy grid. |
| get_map_data | rtabmap_ros/GetMap | Call this service to get map data. |
| publish_map | rtabmap_ros/PublishMap | Call this service to publish map data. |
| list_labels | rtabmap_ros/ListLabels | Get the current label of the graph. |
| update_parameters | std_srvs/Empty | The node will be updated with the current parameters of the rosparam server. |
| reset | std_srvs/Empty | Delete the map. |
| pause | std_srvs/Empty | Pause building. |
| resume | std_srvs/Empty | Restoring the map. |
| trigger_new_map | std_srvs/Empty | A new map will start. |
| backup | std_srvs/Empty | Backup the database to "database_path.back"(default ~/.ros/rtabmap.db.back). |
| set_mode_localization | std_srvs/Empty | Set location-only mode. |
| set_mode_mapping | std_srvs/Empty | Set the mapping mode. |
| set_label | rtabmap_ros/SetLabel | Set the label to the latest node or the specified node. |
| set_goal | rtabmap_ros/SetGoal | Plan to set topology goals. |
| octomap_full | octomap_msgs/GetOctomap | Get octomap. Only available if rtabmap_ros was built with octomap |
| octomap_binary | octomap_msgs/GetOctomap | Get octomap. Only available if rtabmap_ros was built with octomap |
7.4.4 Parameters
| name | type | Defaults | Parse |
|---|---|---|---|
| subscribe_depth | bool | true | Subscribe to depth images |
| subscribe_scan | bool | false | Subscribe to lidar data |
| subscribe_scan_cloud | bool | false | Subscribe to Laser 3D Point Cloud |
| subscribe_stereo | bool | false | Subscribe to binocular images |
| subscribe_rgbd | bool | false | Subscribe to the rgbd_image topic |
| frame_id | string | base_link | Frame attached to mobile base. |
| map_frame_id | string | map | The coordinate system attached to the map. |
| odom_frame_id | string | ' ' | The coordinate system attached to the odometer. |
| odom_tf_linear_variance | double | 0.001 | When using odom_frame_id, the first 3 values of the diagonal of the 6x6 covariance matrix are set to this value. |
| odom_tf_angular_variance | double | 0.001 | When using odom_frame_id, the last 3 values of the diagonal of the 6x6 covariance matrix are set to this value |
| queue_size | int | 10 | The size of the message queue for each synchronization topic. |
| publish_tf | bool | true | Publish TF from /map to /odom. |
| tf_delay | double | 0.05 | |
| tf_prefix | string | ' ' | The prefix to add to the generated tf. |
| wait_for_transform | bool | true | The wait for the transform when the tf transform is still unavailable(the maximum wait time for a transform is seconds). |
| wait_for_transform_duration | double | 0.1 | wait_for_transform wait time. |
| config_path | string | ' ' | Path to a configuration file containing RTAB mapping parameters. Parameters set in the startup file will override those in the configuration file. |
| database_path | string | .ros/rtabmap.db | Path to the rtabmap database. |
| gen_scan | bool | false | Generate a laser scan from a depth image(using the middle horizontal line of the depth image). Not generated if subscribe_scan or subscribe_scan_cloud is true. |
| gen_scan_max_depth | double | 4.0 | The maximum depth of the generated laser scan. |
| approx_sync | bool | false | Use approximate time synchronization of incoming messages. If false, note that the odometry input must have the exact same timestamp as the input image |
| rgbd_cameras | int | 1 | The number of RGB-D cameras to use(when subscribe_rgbd is true). Currently, up to 4 cameras can be synchronized simultaneously. |
| use_action_for_goal | bool | false | Use actionlib to send metrics targets to move_base. |
| odom_sensor_sync | bool | false | For each node added to the graph, adjust the image and scan pose relative to the odometry pose. |
| gen_depth | bool | false | A depth image is generated from a scanned cloud projection to an RGB camera, taking into account the displacement of the RGB camera from the odometry and lidar frames. |
| gen_depth_decimation | int | 1 | Reduce the image size of the received camera information(creates a smaller depth image) |
| gen_depth_fill_holes_size | int | 0 | Fill empty pixels to that size. Interpolate values from adjacent depth values. 0 means disabled. |
| gen_depth_fill_iterations | double | 0.1 | Maximum depth error(m) to interpolate. |
| gen_depth_fill_holes_error | int | 1 | The number of iterations to fill blanks. |
| map_filter_radius | double | 0.0 | Loads data for only one node within the filter radius(use the latest data) up to the filter angle(map filter angle). |
| map_filter_angle | double | 30.0 | The angle to use when filtering nodes before creating the map. Reference map_filter_radius |
| map_cleanup | bool | true | If you are not subscribed to any map cloud maps, raster maps, or project maps, clear the corresponding data. |
| latch | bool | true | If true, the last message published on the map topic will be saved. |
| map_always_update | bool | true | Always update occupancy raster map |
| map_empty_ray_tracing | bool | true | Perform ray tracing to fill the unknown space of invalid 2D scan rays(assuming invalid rays to be infinite). Only used if map_always_update is also true. |
7.4.5 tf conversion
what is needed:
- base_link → sensor
- odom → base_link
which provided:
map → odom
7.5 node rtabmapviz
This node starts the visualization interface of RTAB-Map. It is a wrapper for RTAB-MapGUI library. It serves the same purpose as rviz, but with RTAB-Map specific options.

7.5.1. Subscription topic
| name | type | Parse |
|---|---|---|
| odom | nav_msgs/Odometry | Odometer. Required if parameter subscribe_depth or subscribe_stereo is true and odom_frame_id is not set. |
| rgb/image | sensor_msgs/Image | RGB/monocular image. If the parameter subscribe_stereo is true, this option is not required(use left/image_rect instead). |
| rgb/camera_info | sensor_msgs/CameraInfo | RGB camera metadata. If the parameter subscribe_stereo is true, this option is not required(use left/camera_info instead). |
| depth/image | sensor_msgs/Image | Register the depth image. Required if parameter subscribe_depth is true. |
| scan | sensor_msgs/LaserScan | Laser scan stream. Required if parameter subscribe_scan is true. |
| scan_cloud | sensor_msgs/PointCloud2 | Laser scan stream. Required if parameter subscribe_scan_cloud is true. |
| left/image_rect | sensor_msgs/Image | Left eye corrected image. Required if parameter subscribe_stereo is true. |
| left/camera_info | sensor_msgs/CameraInfo | Left eye camera parameters. Required if parameter subscribe_stereo is true. |
| right/image_rect | sensor_msgs/Image | Right corrected image. Required if parameter subscribe_stereo is true. |
| right/camera_info | sensor_msgs/CameraInfo | Right eye camera parameters. Required if parameter subscribe_stereo is true. |
| odom_info | rtabmap_ros/OdomInfo | Required if parameter subscribe_odom_info is true. |
| info | rtabmap_ros/Info | Statistics for rtabmap. |
| mapData | rtabmap_ros/MapData | rtabmap's graph and latest node data. |
| rgbd_image | rtabmap_ros/RGBDImage | RGB-D sync image, only if subscribe_rgbd is true. |
7.5.2 parameter configuration
| name | type | Defaults | Parse |
|---|---|---|---|
| subscribe_depth | bool | false | Subscribe to depth images |
| subscribe_scan | bool | false | Subscribe to lidar data |
| subscribe_scan_cloud | bool | false | Subscribe to Laser Scan Point Cloud. |
| subscribe_stereo | bool | false | Subscribe to binocular images. |
| subscribe_odom_info | bool | false | Subscribe to odometer information messages. |
| subscribe_rgbd | bool | false | Subscribe to the rgbd_image topic. |
| frame_id | string | base_link | The coordinate system attached to the mobile base. |
| odom_frame_id | string | ' ' | The coordinate system of the odometer. If empty, rtabmapviz will subscribe to the odom topic for odometers. If set, get odometer from tf. |
| tf_prefix | string | ' ' | The prefix to add to the generated tf. |
| wait_for_transform | bool | false | When the tf transform is still unavailable, wait for the transform(up to 1 second). |
| queue_size | int | 10 | Message queue size per synchronization topic. |
| rgbd_cameras | int | 1 | The number of RGB-D cameras to use(when subscribe_rgbd is true). Currently, up to 4 cameras can be synchronized simultaneously. |
7.5.3 the required tf conversion
- base_link → sensor coordinate system
- odom → base_link
- map → odom