1. Mobile APP remote control tutorial
1. Mobile APP remote control tutorial 1.1. Mobile phone scan code to install APP 1.2. APP connection to Rosmaster 1.2.1. Select equipment 1.2.2. Establish a network connection 1.3, APP function introduction 1.3.1. Remote control 1.3.3. colorful lights 1.3.4. Instructions for use
1.1. Mobile phone scan code to install APP
For Android system users, please open the Google Play app store and search for [MakerControl], or open your mobile browser, scan the QR code below, and download and install the [MakerControl] APP.
IOS system users, please open the App store and search for [MakerControl], or open the code scanner, scan the QR code below, and download and install the [MakerControl] APP.
If the latest version of [MakerControl] APP is already installed on your phone, you do not need to install it again.

1.2. APP connection to Rosmaster
Rosmaster's factory-built system comes with a hotspot signal [ROSMASTER] and password [12345678]. You can first use your mobile phone to connect to Rosmaster's hotspot signal to form a local area network. Or connect both Rosmaster and mobile phone to the same router to form a local area network.
1.2.1. Select equipment
Open the [MakerControl] APP for the first time, according to the purchased robot model, you need to select the [Rosmaster X3] device in the [ROS Robot]
1.2.2. Establish a network connection
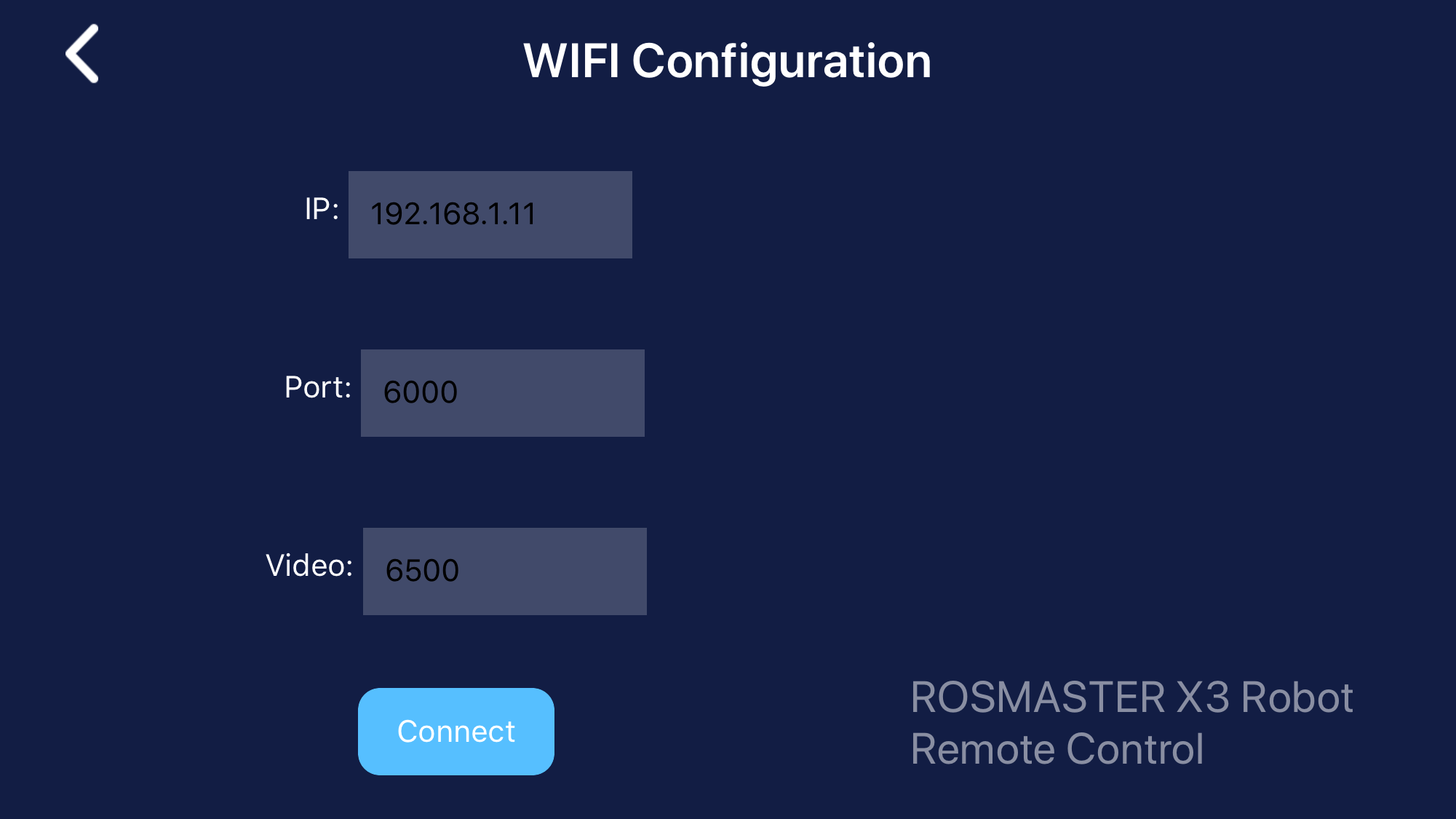
Click the WiFi icon in the upper right corner to connect the ROSMASTER robot.

Fill in the IP address displayed by the OLED in the ROSMASTER robot in the IP column. Use the default parameters in the Port and Video columns. Click [Connect]. After the connection is successful, it will automatically jump to the main control interface, and the WiFi icon in the upper right corner is no longer there. A prohibition sign appears.
Note: Before connecting the device, please confirm that the mobile phone is connected to the ROSMASTER hotspot signal, or the mobile phone and the ROSMASTER car are connected to the same router. And the app program has been started (the factory system defaults to start the app program).
1.3, APP function introduction
The main interface of Rosmaster APP is divided into three modules, each of which corresponds to different functions.
1.3.1. Remote control

Click the [remote control] icon on the main interface, and the following interface will appear.
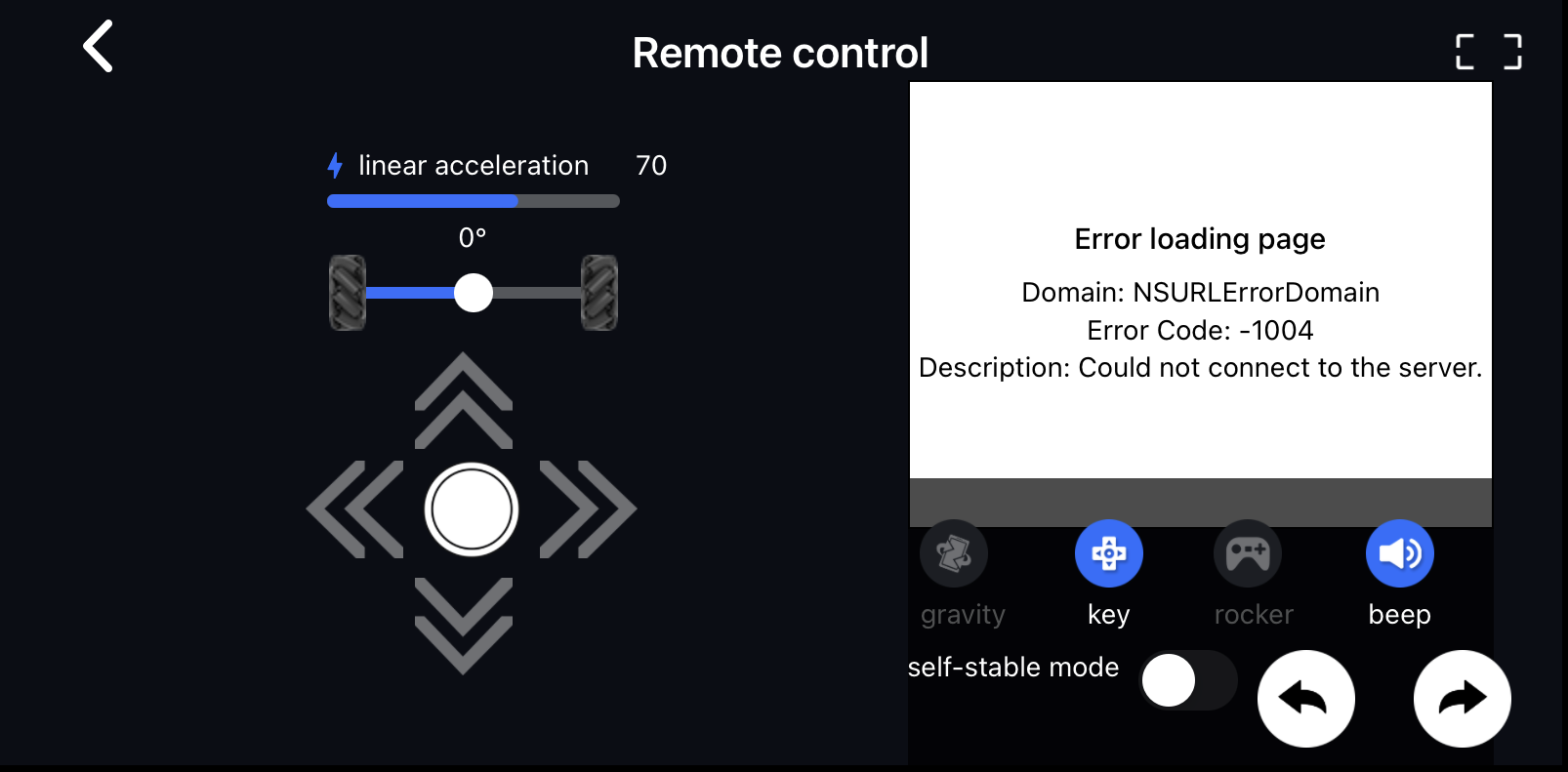
Part 1. Adjust the speed: control the running speed of robot.
Part 2. Adjust the angle of the front wheel servo: control the rotation angle of the front wheel servo.
Part 3. Control the car to move forward and backward, turn left, turn right and stop.
Part 4. Switching the full screen mode: Displays the full screen of the camera, which can be matched with
USB wireless handle and stand to use.
Part 5. Camera display screen.
Part 6. Switch control mode: gravity induction, button control, rokcer control.
Part 7. Whistle: Control the buzzer, press the buzzer to turn on, release the buzzer to turn off.
Part 8. Auto-stabilization mode: When auto-stabilization mode is turned on, the car will immediately receive a stop command; When the car receives a stop command, it will coast for a period of time and stop.
Part 9. Control spin left and right: control the maximum angle of the front wheel servo of robot to rotate left and right.
1.3.3. colorful lights

Click the [Dazzling Lights] icon on the main interface, and the following interface will appear.
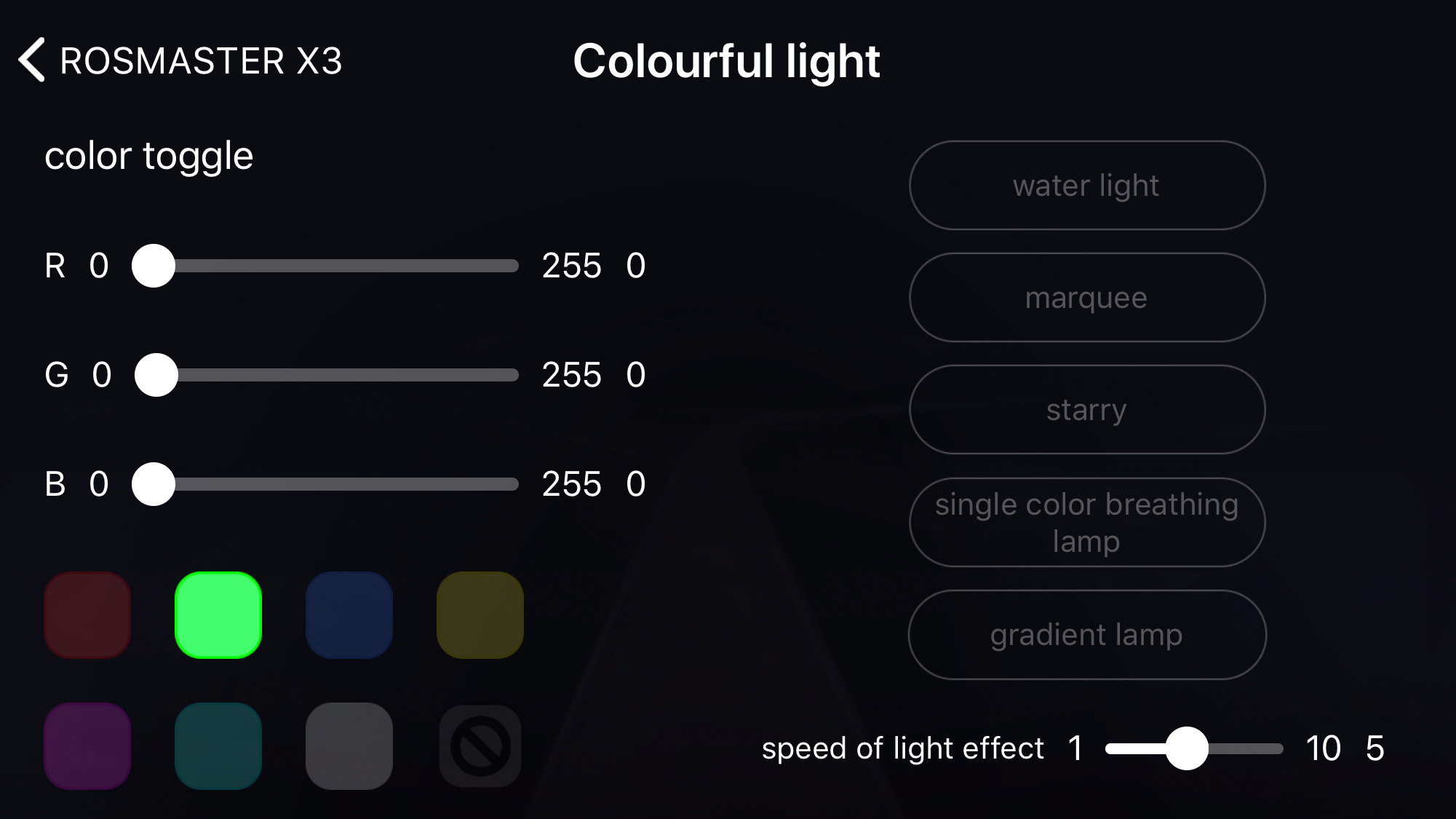
The colorful lights are divided into three parts.
Part 1. [Color Switch] in the upper left part: This function can modify the RGB color of the light bar in real time, directly drag the [R] [G] [B] drag bar, you can see the real-time change of the RGB light bar at the rear of the Rosmaster Cool lighting effects.
Part 2. Lower left part [fixed color switching]: This function can make the RGB light bar display red, green, blue, yellow, purple, cyan, white, off. At the same time, the color of the monochrome breathing light can also be adjusted.
Part 3. [Cool special effects] on the right: Each time you click a button, specific special effects will be displayed, including running water lights, marquee lights, star lights, monochrome breathing lights, and gradient lights. Click the button again to exit the special effects; Drag the bar to change the speed of the lighting effect, the default is 5, the fastest is 1, and the slowest is 10.
1.3.4. Instructions for use
Click the [Configuration] icon on the main interface, and the following interface will appear.
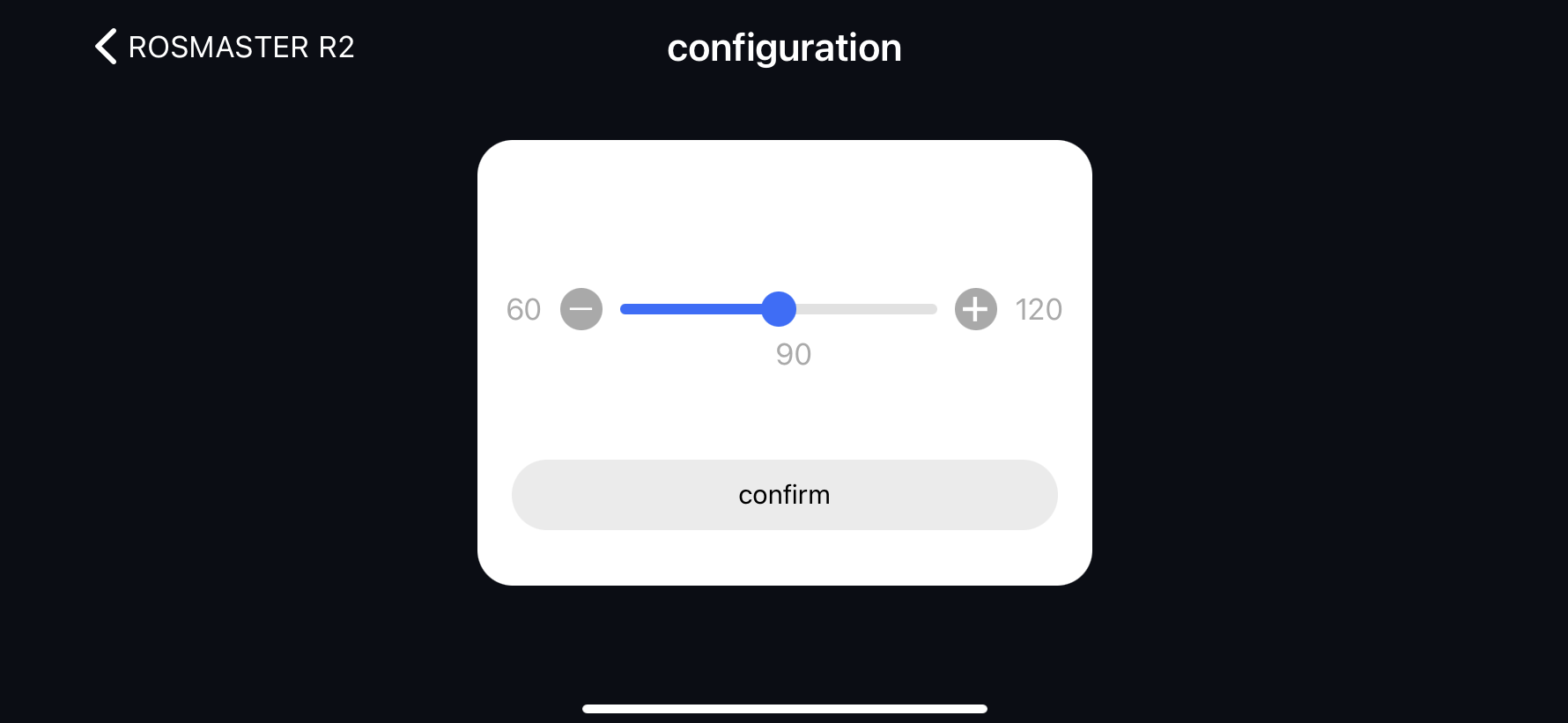
Adjust the relative zero value (default angle value) of the front wheel servo on this interface.
Steps:
- Lift the front wheel of robot away from the ground.
- Then adjust the sliding bar and observe the two front wheels of robot. The best effect is that keep the two front wheels parallel to the front of the robot car.
- Click "comfirm" to save the data.