Software environment configuration (Windows)
To facilitate the development of PicoW board using MicroPython on the computer, it is recommended to download Thonny IDE.
You can go to the official website to refer to the official website to explain the method to install https://thonny.org/
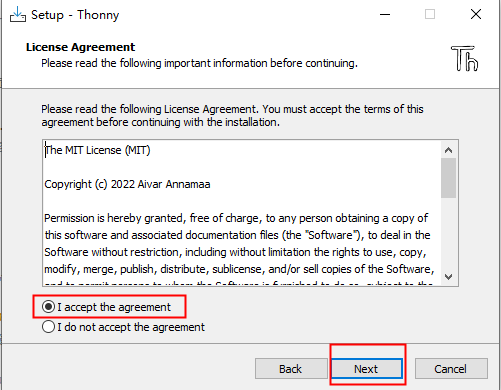
Here we go directly to our data attachment folder to get the installation package file and double-click to install it. The following are the installation steps

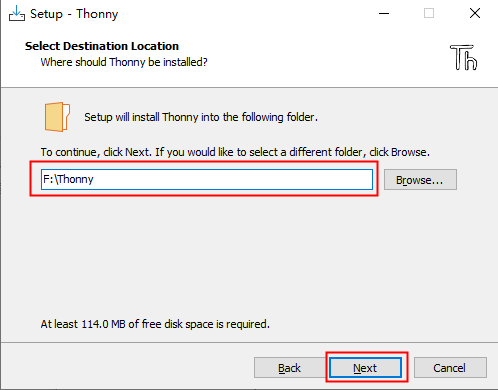
Here, choose the path you want to install
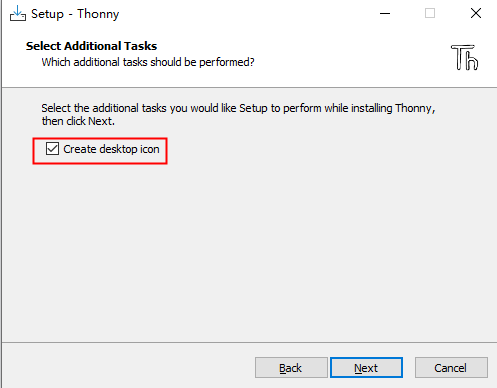
The tick here is to install desktop icons, don't leave it unchecked
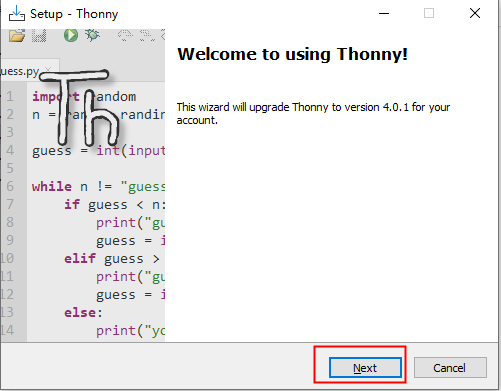
After the installation is complete, click Finish

Software environment configuration (Raspberry Pi)
If you want to control Pico on Raspberry Pi, please refer to this configuration step Current Raspberry Pi systems come with Thonny IDE. But if Thonny is not updated to the latest version, there is no Pico support package. If this is the case, you need to update Thonny to the latest v4.0.1 version.
Open a terminal and enter the following command to update thonny
- sudo apt upgrade thonny
Then open Thonny IDE (click Raspberry logo -> Programming -> Thonny Python IDE)
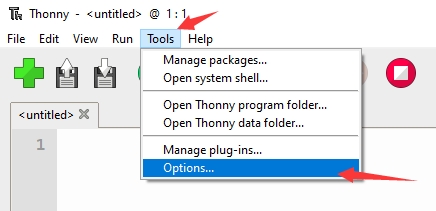
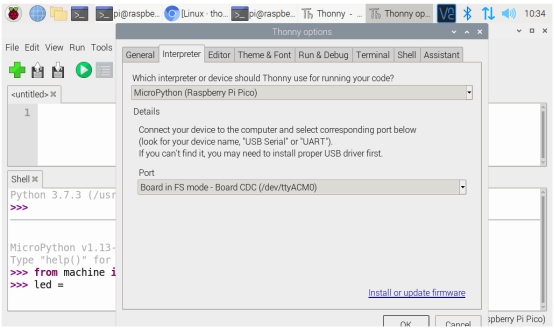
Select Tools -> Options... -> Interpreter
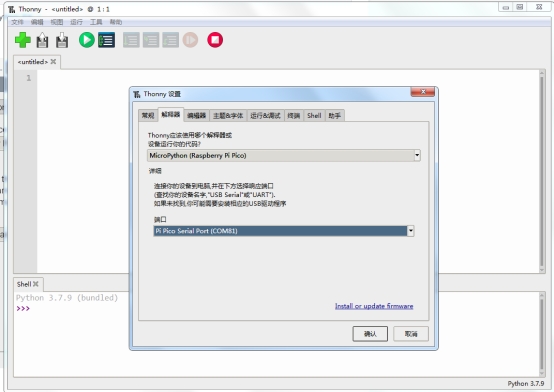
Select MicroPython (Raspberry Pi Pico and ttyACM0 port)
Connect the Pico to the computer (without pressing any keys), if you have not flashed MicroPython before, please follow the instructions of #Flash firmware
Select Tools -> Options... -> Interpreter
Select Raspberry Pi Pico in the interpreter options (be careful to download the latest version of Thonny, otherwise there is no option)
Port selection
On the computer, the port is selected as, after connecting to Pico, the COM port recognized by the computer
On the Raspberry Pi, the port is identified as /dev/ttyACM0.
Then confirm
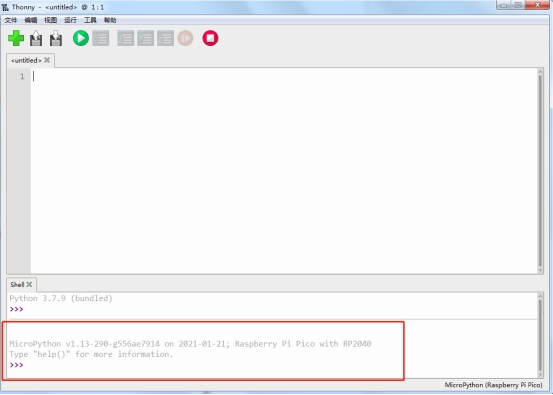
After confirmation, you can see that there will be multiple Pico information in the command line interface. Now you can enter the MicroPython program here to control the pico.