14.2 Kinematics Analysis of Ackermann Car
14.2.1、Ackerman car model introduction
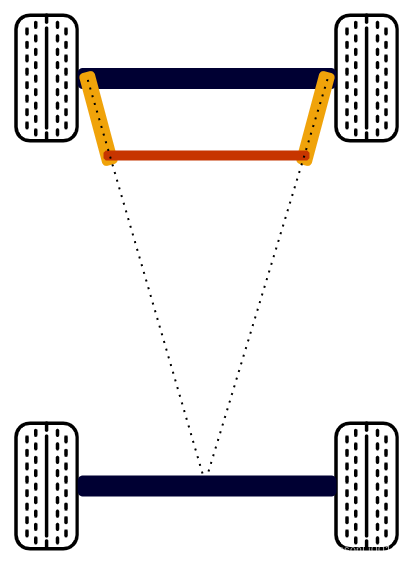
The whole vehicle has a total of 4 wheels, the front 2 wheels are steering gear steering wheels, and the rear 2 wheels are driving wheels, which are mainly responsible for the overall movement. The difference from other types of cars is that it has its own unique steering gear, while other types of cars adjust the turning through the differential speed of the left and right wheels. The main parameters of Ackerman models include left and right wheelbase, front and rear wheel spacing and turning radius.

14.2.2、Ackerman structural dynamics model
Ackermann Model Steering Features:
- When driving before, the axes of the 4 wheels are parallel to each other and perpendicular to the longitudinal center plane of the vehicle body;
- During the turning process, all 4 wheels must make a circular motion around an instantaneous center point.
When the Ackerman model is turning, the angles of the inner and outer wheels are different, and the turning radius of the inner tire is smaller than that of the outer tire, as shown in the figure below.
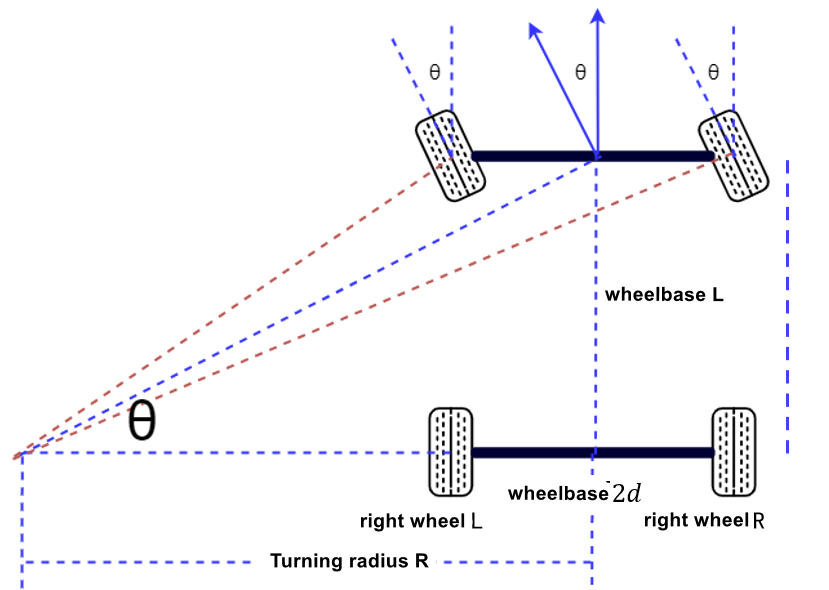
Among them, β is the turning angle of the front outer wheel of the car, α is the turning angle of the front inner wheel of the car, K is the wheelbase, L is the wheelbase, and R is the minimum turning radius. The minimum turning radius is a very important parameter in the Ackerman motion model. From this, the Ackerman core formula can be derived:
Minimum turning radius R:
In low-speed environments,
The turning radius of the vehicle's travel path changes slowly, and at this time we can assume that the rate of change of direction of the vehicle is equal to the angular velocity of the vehicle. Then the angular velocity of the vehicle is following.
Using the relationship between the wheelbase L and the front wheel angle θ can be obtained,
When the slip angle (the angle formed between the direction of travel of the car and the direction of the rim) is small and the slip angle of the rear wheel is 0, combining 1.1 and 1.2 can be obtained,
The steering radius of the inner and outer tires is different.
Then it can be obtained that the front wheel rotation angle θ is
The minimum turning radius R is
The position of the vehicle is predicted from the minimum turning radius:
Assuming that in the vehicle coordinate system, the vehicle speed is v, the distance moved in t time is v*t, and the direct turning radius is R, it can be calculated that the angle the vehicle has turned is σ,
Combined with the turning radius R calculated above, it can be obtained
Then in the vehicle coordinate system, the vehicle position coordinates after time t are updated as