Rviz simulation in ros2 environment
Rviz simulation in ros2 environmentRviz simulation in ros2 environmentQuickly useConfigure rviz2 from the model
Rviz simulation in ros2 environment
Strictly speaking, rviz is not a simulation software, but it can visually display the state of the robot and pass the relevant joint_ states_ Pubilsher controls the displayed joint posture of the robot.Please see section 9.0 first. Some instructions will not be explained in detail.
Quickly use
This section describes how to use
ros2 launch champ_config display.launch.py
The display is as follows:
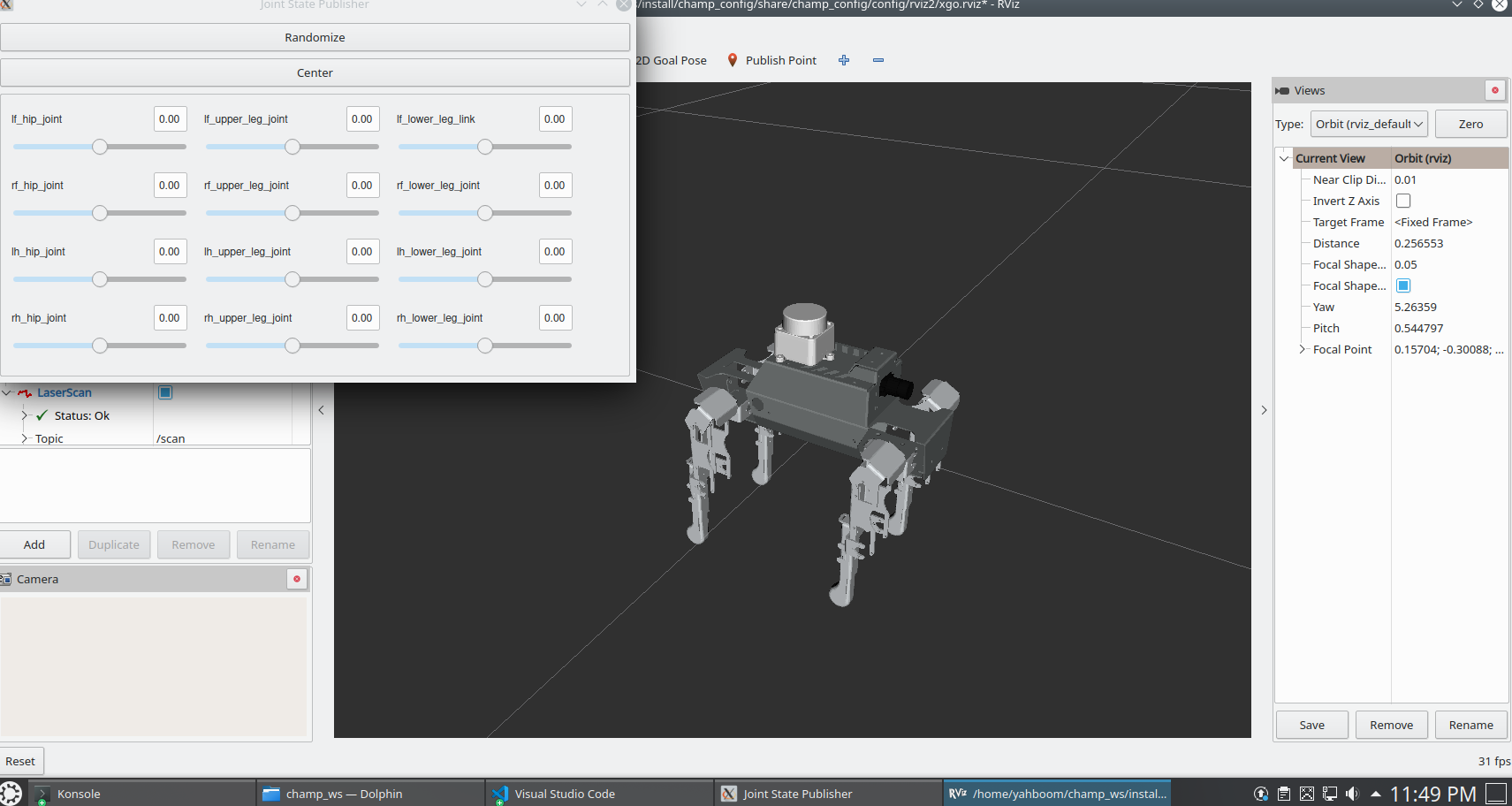
The posture of each joint can be adjusted through the slider in the small window. The figure shows the initial position (the initial position is determined by STL and URDF files exported by SOLIDWORK. The initial position is as shown above, which can facilitate the kinematic calculation of subsequent simulation)
The corresponding relationship of each joint is as follows:
The corresponding relationship of each joint is as follows:
x/**:ros__parameters:joints_map:left_front: #Left front leg\- lf_hip_joint #shoulder\- lf_upper_leg_joint #Boom\- lf_lower_leg_joint #Forearm\- lf_foot_joint #Toe (virtual joint)right_front:\- rf_hip_joint\- rf_upper_leg_joint\- rf_lower_leg_joint\- rf_foot_jointleft_hind:\- lh_hip_joint\- lh_upper_leg_joint\- lh_lower_leg_joint\- lh_foot_jointright_hind:\- rh_hip_joint\- rh_upper_leg_joint\- rh_lower_leg_joint\- rh_foot_joint
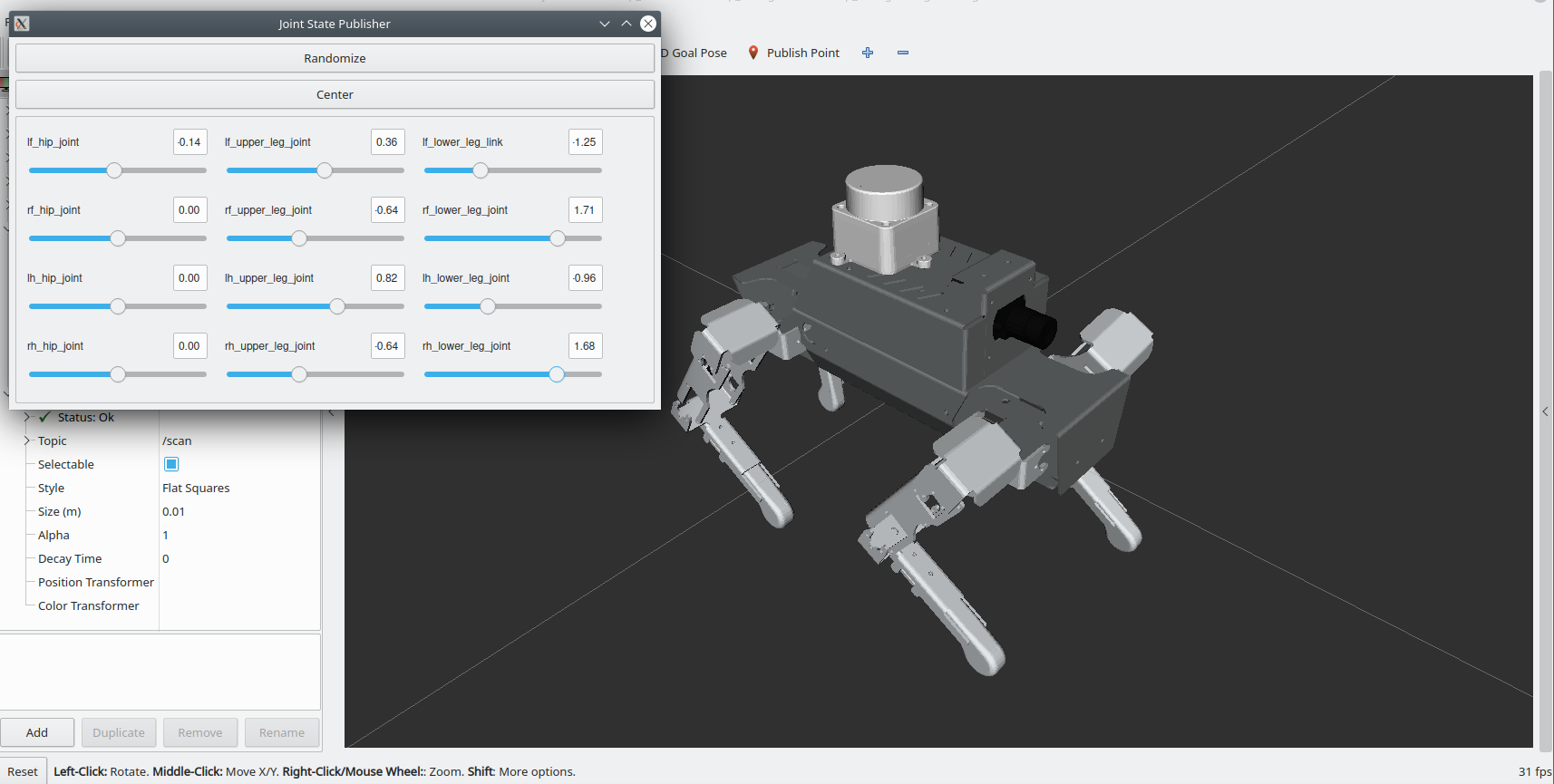
After adjust, as shown in the following figure.
Configure rviz2 from the model
Advanced part
Model modification
Change the suffix name of the URDF file exported by SolidWorks to xacro, as shown in the following figure (add a sentence after the robot name)
Check whether the joint setting is correct
<joint
name="lf_hip_joint"
type="revolute">
<origin
xyz="0.09332 0.022407 0.01454"
rpy="0 0 0" />
<parent
link="base_link" />
<child
link="lf_hip_link" />
<axis
xyz="-1 0 0" />
Create launch file
xxxxxxxxxximport osfrom ament_index_python.packages import get_package_prefixfrom ament_index_python.packages import get_package_share_directoryfrom launch import LaunchDescriptionfrom launch.actions import DeclareLaunchArgument, ExecuteProcess, IncludeLaunchDescriptionfrom launch.conditions import IfCondition, UnlessConditionfrom launch.launch_description_sources import PythonLaunchDescriptionSourcefrom launch.substitutions import Command, LaunchConfiguration, PythonExpressionfrom launch_ros.actions import Nodefrom launch_ros.substitutions import FindPackageShareimport xacrodef generate_launch_description():\# Constants for paths to different files and folders\# Set the path to different files and folders.\#Specify path:default_xacro_model_path = os.path.join(get_package_share_directory('champ_description'), 'urdf/', 'xgo_rviz.xacro')default_rviz_config_path = os.path.join(get_package_share_directory('champ_config'), 'config/rviz2/', 'xgo.rviz')\# Launch configuration variables specific to simulation\#Configuration variablesgui = LaunchConfiguration('gui')rviz_config_file = LaunchConfiguration('rviz_config_file')\# Declare the launch arguments\#Declare startup parametersdeclare_use_joint_state_publisher_cmd = DeclareLaunchArgument(name='gui',default_value='True',description='Flag to enable joint_state_publisher_gui')declare_rviz_config_file_cmd = DeclareLaunchArgument(name='rviz_config_file',default_value=default_rviz_config_path,description='Full path to the RVIZ config file to use')declare_xacro_model_path_cmd = DeclareLaunchArgument(name='xacro_model',default_value=default_xacro_model_path,description='Absolute path to robot xacro file')declare_use_robot_state_pub_cmd = DeclareLaunchArgument(name='use_robot_state_pub',default_value='True',description='Whether to start the robot state publisher')declare_use_rviz_cmd = DeclareLaunchArgument(name='use_rviz',default_value='True',description='Whether to start RVIZ')robot_description_config = xacro.process_file(default_xacro_model_path)robot_desc = robot_description_config.toxml()\# Subscribe to the joint states of the robot, and publish the 3D pose of each link.\#Robot status releasestart_robot_state_publisher_cmd = Node(package="robot_state_publisher",executable="robot_state_publisher",name="robot_state_publisher",parameters=[{"robot_description": robot_desc}],output="screen")\# Publish the joint state values for the non-fixed joints in the URDF file.\#Robot joint status publishing nodestart_joint_state_publisher_cmd = Node(condition=UnlessCondition(gui),package='joint_state_publisher',executable='joint_state_publisher',name='joint_state_publisher')\# A GUI to manipulate the joint state values\#Robot joint state publishing node (with GUI)start_joint_state_publisher_gui_node = Node(condition=IfCondition(gui),package='joint_state_publisher_gui',executable='joint_state_publisher_gui',name='joint_state_publisher_gui')\# Launch RViz2\#Start rviz2start_rviz_cmd = Node(package='rviz2',executable='rviz2',name='rviz2',output='screen',arguments=['-d', rviz_config_file])return LaunchDescription([declare_use_joint_state_publisher_cmd,declare_rviz_config_file_cmd,declare_xacro_model_path_cmd,declare_use_robot_state_pub_cmd,declare_use_rviz_cmd,start_robot_state_publisher_cmd,start_joint_state_publisher_cmd,start_joint_state_publisher_gui_node,start_rviz_cmd,])